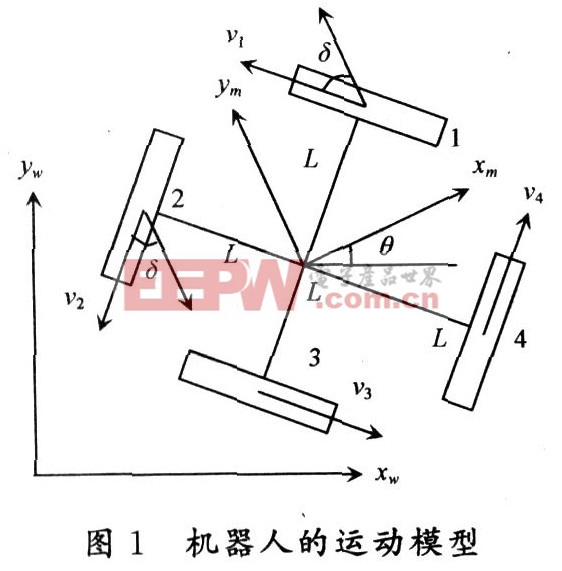
- 摘 要:通过对足球机器人运动学模型的分析,考虑到系统的时变、非线性、干扰大等特点,以全向移动机器人为研究平台,提出一种将模糊控制与传统PID控制相结合的方法,应用到足球机器人的运动控制系统中。针对足球机器
- 关键字:
运动 控制 研究 PID 模糊 移动 机器人 全方位
- 1 引言 由于缺乏适当的数学手段以及自适应系统本身严重的非线性,对具有时变参数的线性系统进行控制分析是非常困难的。应该指出,时变系统自适应控制的关键在于,如何提高系统对由参数时变引起的摄动的鲁棒性
- 关键字:
仿真 扩展芯片 集成 汽车
- 质量管理大师朱兰在他那本著名的质量专著《朱兰质量手册》里提到,国际标准术语确定的术语“产品”包含四...
- 关键字:
流程 设计 质量 监测 试验 仿真 模拟
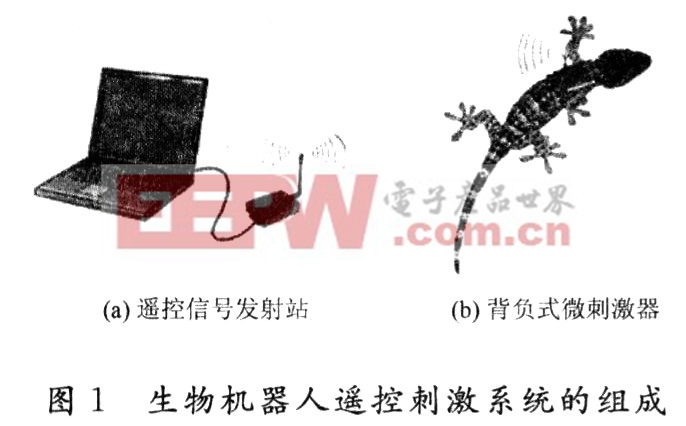
- 遥控刺激系统是动物机器人摆脱各种信号线束缚实现自由运动的必经之路,也是动物机器人走出实验室的必需设备,它的研制在动物机器人研究中具有重要的意义。恒流多通道动物机器人遥控刺激系统由“刺激信号发射站”和tt背负式微刺激器”两大部分组成,其不但能够实现对动物机器人双相的恒流脉冲刺激,而且每通道的多个刺激参数分别可调,同时还具有多点住联合刺激和延时刺激的功能。其中,“背负式微刺激器’’尺寸小,重量轻,能耗低,性能可靠,适合小型动物的无线刺激实验。
- 关键字:
系统 研制 刺激 遥控 动物 机器人 通道 转换器
- 把开关电源系统表示成数学模型或非线性控制模型,利用Matlab建立一个离散的、非线性的仿真模型。并利用该模型对220 V高频开关电源进行仿真。仿真试验分析逆变电源工作过程和动态特性,逆变电源输出电压及其频谱分析、总谐波畸变率。对输出电压波形进行分析,结果表明:系统输出谐波含量比较少且具有良好的稳态性能。
- 关键字:
仿真 研究 系统 开关电源 PWM 控制 基于 Matlab
- 现在的许多FPGA用户工作中都要用到模拟。但是,什么时候才能不用模拟,直接将设计放到芯片里?要点*...
- 关键字:
FPGA 模拟 仿真 ASIC SOC
- 摘要:分析了各种多谐振荡器的电路结构及工作原理,并利用Multisiml0.0对部分电路进行了仿真,重点介绍了单稳型多谐振荡器,讨论集成单稳态触发器74121定时元件RC对暂稳态的影响以及单稳型多谐振荡器的应用。Multis
- 关键字:
多谐振荡器 仿真
- 摘要:以水泥回转窑的控制为对象,采用模糊控制器来实现控制。阐述了控制器的设计思想,利用MATLAB中的模糊工具箱设计模糊控制器,通过语言变量的模糊化,并有机地将MATLAB与SIMULINK结合起来方便有效地实现模糊控制
- 关键字:
设计 仿真 控制系统 模糊 Mat1ab 回转窑 基于
- 摘要:提出了直接传输光通信系统中三阶高密度双极性信号编译码实现方法,分析了三阶高密度双极性信号编、译码规则,并用硬件描述语言构建了其编、译码模型,通过EDA技术实现仿真,验证了其设计的有效性,对设计数字基
- 关键字:
密度 编译码 建模 仿真
- 摘 要:为了简化仿人机器人控制系统结构,增强机器人系统的功能。采用PC/104嵌入式系统作为仿人机器的主控计算机,完成图像处理,做出控制决策,计算并生成运动序列。关节控制器选用C8051F310单片机,采用串口与主控
- 关键字:
控制系统 设计 机器人 单片机 PC 基于
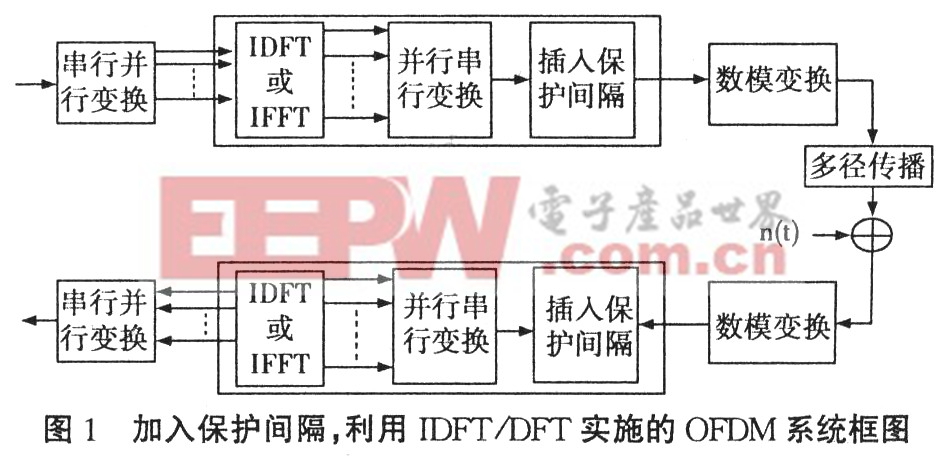
- 摘要:介绍了MIMO技术,OFDM的基本原理,利用两者的优点将其结合起来运用到未来移动通信系统中,并将成为未来移动通信中的关键技术。空时编码技术在MIMO-OFDM系统中的应用,通过仿真表明0FDM技术通过FFT变换能将频率
- 关键字:
技术 仿真 研究 编码 空时 OFDM 系统 MIMO
机器人.仿真介绍
您好,目前还没有人创建词条机器人.仿真!
欢迎您创建该词条,阐述对机器人.仿真的理解,并与今后在此搜索机器人.仿真的朋友们分享。
创建词条
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司

京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473