- 0 引 言
单片机的学习是一个实践性很强的过程,目前的单片机实验室基本采用硬件仿真设备搭建,受资金和场地的限制,单片机实验室配置的灵活性和完整性受到一定的限制。针对这些问题,在此提出一种建立基于个人P
- 关键字:
方法 建立 实验室 虚拟 单片机 仿真 PCB
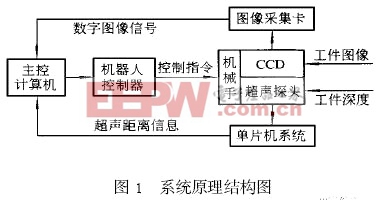
- 视觉传感器能直观反映物体的外部信息,但单个摄像头只能获得物体的二维图像,立体视觉虽能提供三维信息,但对于外形相同,仅深度有差别的物体难以识别(如有孔物体、阶梯状物等) ,且对环境光线有一定的要求. 由于超声传
- 关键字:
自动识别 系统 机器人 技术 视觉 超声 基于
- MCU(MicrocontrollerUnit)即单片机是大家都比较熟悉并常用的电子器件,由于其广泛的应用,所以用单片机设计电路是电子技术人员必备的技能。对于初学者,可以先从软件仿真入手。我们知道利用Proteus软件可以进行
- 关键字:
单片机 协同 仿真 进行 模块 Multisim10 MCU 利用

- TKScope嵌入式仿真开发平台加速您的设计,TKScope是广州致远电子有限公司2008年隆重推出上市的一款高性能通用型综合仿真开发平台,支持仿真全系列的8051、ARM、DSP、AVR、C166、C251、MX等内核;与当前全部主流IDE环境无缝嵌接,如Keil、ADS、IAR、CCS、RealView、AMRStudio、TKStudio等,保证您的开发平台始终如一,并具备其高级调试功能。同时,TKScope内嵌64路专业的逻辑分析仪,zlgLogic高级软件全面支持。
- 关键字:
加速 设计 开发平台 仿真 嵌入式 TKScope

- TKScope嵌入式仿真开发平台讲座(5), 用户在ARM内核仿真中,会遇到各种异常情况导致仿真无法进行,或仿真功能无法满足要求,主要原因是仿真器功能不全。针对用户的问题,TKScope系列在以下几个方面进行了功能强化,协助用户解决ARM仿真中遇到的各种异
- 关键字:
讲座 开发平台 仿真 嵌入式 TKScope
- 介绍了一种为机器人添加视觉模块而进行智能导航的设计。主要通过为广茂达AS-UII型机器人添加无线模块将图像信息发至计算机,经图像处理后对机器人进行遥控操作达到闭环控制的目的。此设计价格低廉、运行稳定。
- 关键字:
导航 机器人

- 松下EVOLTA电池驱动的三轮机器人于8月6日在法国勒芒赛中第二次打破吉尼斯世界纪录。该电池在2008年1月首次打破世界纪录并被誉为“最持久耐用的AA碱性电池”。干电池驱动机器人在挑战勒芒24小时耐力赛中跟随着引导车的红外线,装置在参赛机器人背部的2节AA干电池驱动它不停地蹬动三轮车的脚踏板,围 绕着勒芒赛4.2千米的赛道24小时内行驶了5.6圈,约23.726千米即14.82英里。吉尼斯世界纪录将其誉为“距离最长的电池驱动遥控模型车”。 这款包含三轮车
- 关键字:
松下 机器人 电池
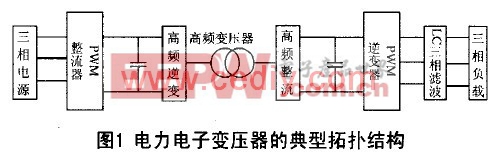
- 引 言 电力电子变压器PET(Power-Electronic Transformer)作为一种新型的电力变压器,得到了国内外研究人员越来越多的关注。它是一种含有电力电子变换器且通过高频变压器实现磁耦合的变电装置。PET在完成常
- 关键字:
耦合 仿真 运行 变压器 电子 电力
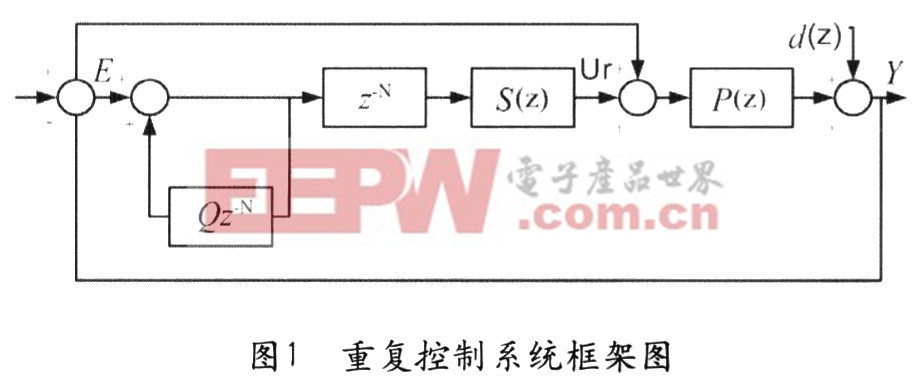
- 介绍了光伏并网系统的工作原理及其孤岛效应现象,并网逆变器采用基于重复控制补偿的P J控制方法,孤岛效应识别方法采用主动频率偏移法,并在MATLAB/SIMULINK下分别进行了系统的建模与仿真。结果表明:输出并网电流波形良好,其基本实现并网电流的无误差跟踪,和电网电压同频同相,并可以有效地检测出系统的孤岛效应。
- 关键字:
策略 仿真 研究 孤岛 及其 并网 系统 单相
- 引 言
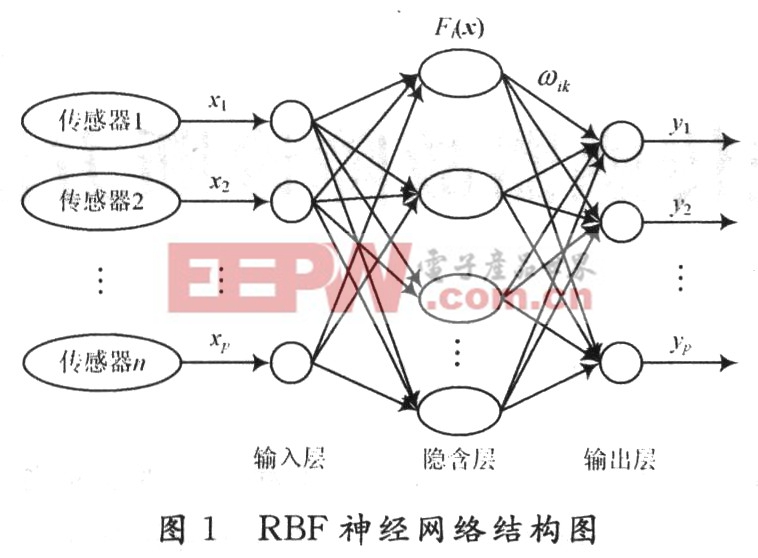
传感器是现行研究的压铸机实时检测与控制系统的关键部件,系统利用传感器对压铸机的各重要电控参数 (如:合型力、油压、压射速度、模具温度等)进行检测,并进行准确控制。这一过程中,各传感器输出信号的
- 关键字:
故障 诊断方法 传感器 控制系统 RBF 神经网络 基于 仿真
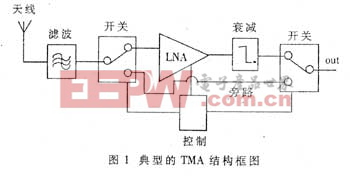
- 本文给出了基于E-pHEMT管ATF-54143和混合耦合器2A1306-3的射频低噪声放大器的设计、仿真分析与测试。测试结果表明,实际测得的LNA技术指标能够与仿真结果较好地吻合,E-pHEMT管的低噪声系数和高OIP3使它在高动态范围电路设计上具有很大的优势,并且该放大器的技术指标达到了CDMA基站的接收前端对低噪声放大器的规范要求,具有很好的应用前景。
- 关键字:
仿真 实现 LNA 射频 基站 前端 1.9GHz 射频

- 超声波并不是测量机器人与物体间距离的唯一方法,也可以利用红外线。和超声波测量不同,红外线距离传感器不会去探测线光束的传播时间。因为对于我们感兴趣的距离,传输时间为10―15―10-12秒数量级。只有那些
- 关键字:
测量 距离 红外线 机器人 基于
- 引 言
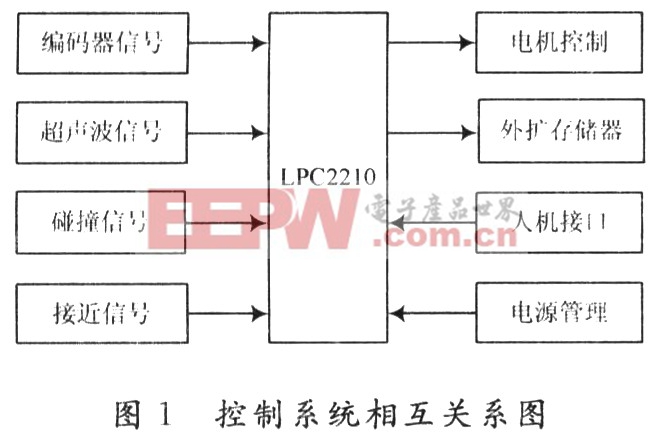
随着人口的老龄化和社会福利制度的完善,导致劳动力成本的急剧上升,一些简单的重复性的体力劳动为服务机器人提供了广阔的市场。清洁机器人是服务机器人的一种,可以代替人进行清扫房间、车间、墙壁等。
- 关键字:
设计 控制系统 机器人 吸尘 ARM
- 本文介绍了软开关变换相对于传统电路中的硬开关变换的优点,对几种典型的软开关进行了叙述和比较,并给出了其中两个有代表性变换电路的Pspice仿真结果,最后提出了软开关技术可能的发展趋势。
- 关键字:
Pspice DC 功率变换器 仿真
机器人.仿真介绍
您好,目前还没有人创建词条机器人.仿真!
欢迎您创建该词条,阐述对机器人.仿真的理解,并与今后在此搜索机器人.仿真的朋友们分享。
创建词条
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司

京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473



