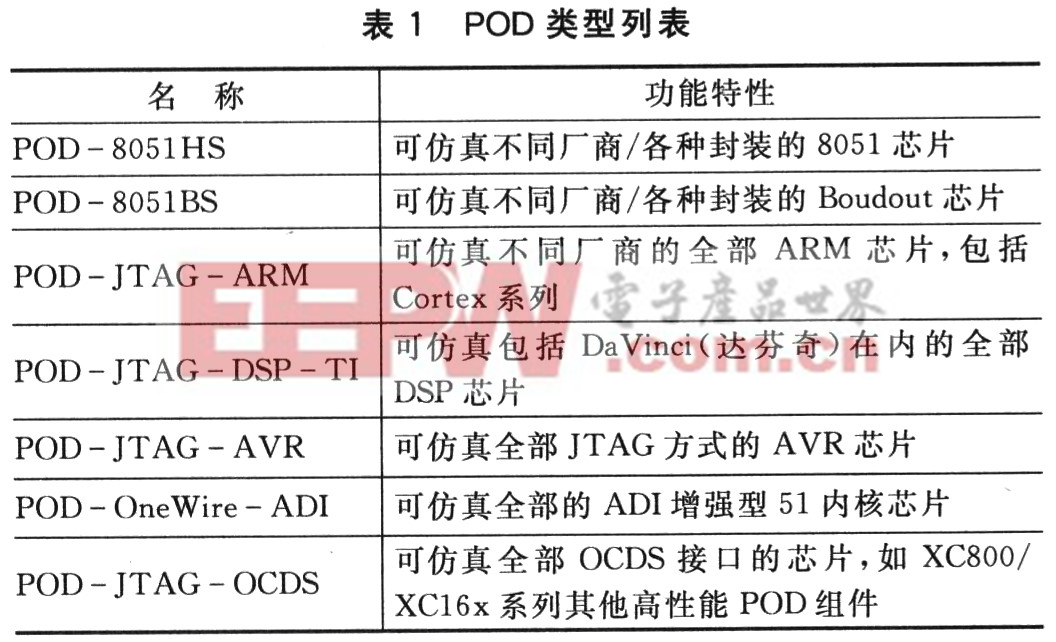
- TKScope嵌入式仿真开发平台讲座(6), TKScope是广州致远电子有限公司2008年隆重推出的一款高性能通用型综合仿真开发平台,支持仿真全系列的8051、ARM、DSP、AVR、 C166、C251、MX等内核;与当前全部主流IDE环境无缝嵌接,如Keil、ADS、IAR、CCS、Rea
- 关键字:
讲座 开发平台 仿真 嵌入式 TKScope
- ProteuS在ARM系统设计中的应用,引 言
现在,人们生活中的每个角落都有嵌入式设备的存在,比如DVD、移动电话、MP3及掌上电脑等等。这些嵌入式设备多采用32位RISC嵌入式处理器作为核心部件。其中基于ARM核的嵌入式处理器独占鳌头,在32位RISC处
- 关键字:
应用 设计 系统 ARM ProteuS 仿真
- 引 言
智能寻迹机器人是一种被广泛研究的机器人,而且国内外都有许多重要的比赛都以寻迹机器人为核心展开,如我国的“飞思卡尔”杯全国大学生智能车大赛,以及吸引亚太地区众多国家参赛的亚广联(ABU)机器人大赛
- 关键字:
系统 三点三轮 机器人 路线 复杂 传感
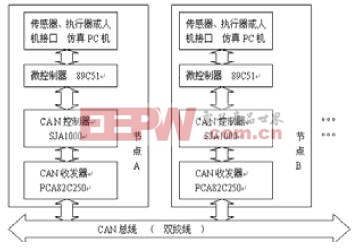
- 文章设计了一个控制器局域网CAN总线系统节点的仿真平台,通过选用兼容扩展性及检错纠错能力强的SJA1000芯片作为CAN控制器核心,利用普通PC机仿真传感器、执行器和人机接口,实现的仿真平台具有灵活通用、简单可靠、性价比高及良好的开放性和扩展性等特点,为CAN总线系统在汽车及其它多种不同领域的自动控制系统中推广应用,提供了方便的研究开发条件。
- 关键字:
仿真 平台 实现 节点 系统 SJA1000 CAN 总线 基于 CAN
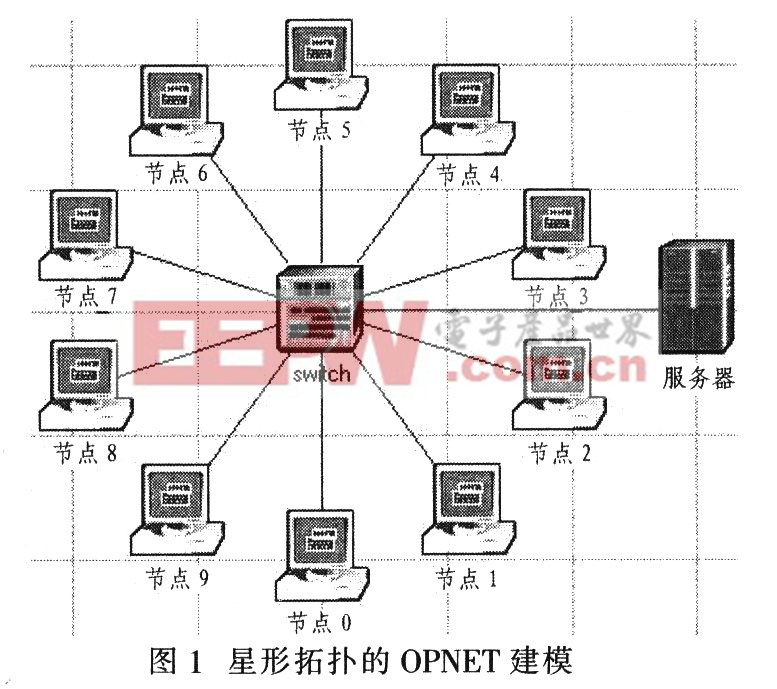
- 为分析比较局域网中星形、环形和树形3种典型的点到点拓扑的优缺点,运用优化网络工程工具(0ptimized Network Engineering Tools,简称OPNET)建立3种拓扑模型,并对其性能仿真。通过分析仿真数据,对3种拓扑的延时、通信量和负载进行比较,给出了3种拓扑各自优缺点,从而为网络规划选择的最佳拓扑提供了技术参考。
- 关键字:
建模 仿真 拓扑 局域网 OPNET 基于

- 1 引言
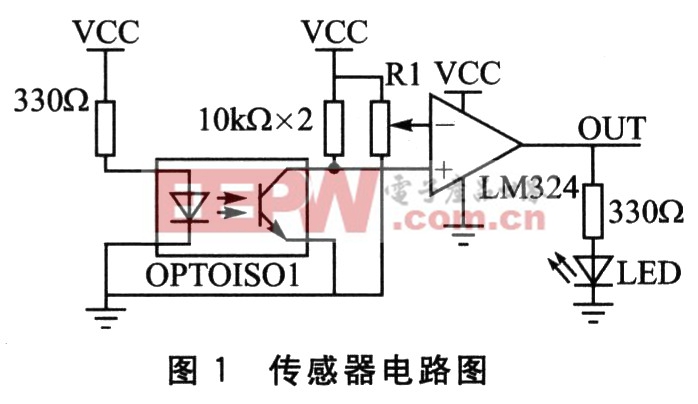
光纤温度检测技术是近些年发展起来的一项新技术,由于光纤本身具有电绝缘性好、不受电磁干扰、无火花、能在易燃易爆的环境中使用等优点而越来越受到人们的重视,各种光纤温度传感器发展极为迅速。目前研
- 关键字:
仿真 实验 建模 传感器 光纤 温度 体式
- 如果你见到美国贝勒大学医学中心的机器人“贝西”,或许有身处未来的感觉。它已带领人们提前进入未来世界,享受前沿科学成果。有了它,医生可以在世界任何地方为千里之外的病人做检查,和病人进行“面对面”交流,实现远程巡诊。
医生只要接入无线宽带网络,就可以使用普通个人电脑与巡诊机器人保持联络。他们可以用操纵杆控制机器人移动,调整安装在机器人头部的屏幕和摄像机角度。
医生可以通过机器人观察病人,向病人询问病情,检查心跳及脉搏,甚至进行X射线透视。病人可以
- 关键字:
医疗电子 机器人
- 1 引言
雷达在现代战争中不可或缺。雷达系统的仿真是雷达系统分析设计、模拟训练的一种重要手段,受到人们越来越多的重视。而雷达显示器作为整个雷达系统显示终端和人机交互界面,其仿真实现水平直接影响整个系
- 关键字:
Studio 雷达显示器 仿真
- 引言:
近年来,人们广泛的将模糊控制技术应用于生产生活各个领域。它以其不依靠被控对象的精确数学模型、适应性好、系统鲁棒性好以及易于实现无超调控制[1]而受到业内人士青睐。尤其是二维模糊控
- 关键字:
设计 仿真 控制器 模糊 跟踪 伺服系统 光电
- 0 引 言
单片机的学习是一个实践性很强的过程,目前的单片机实验室基本采用硬件仿真设备搭建,受资金和场地的限制,单片机实验室配置的灵活性和完整性受到一定的限制。针对这些问题,在此提出一种建立基于个人P
- 关键字:
方法 建立 实验室 虚拟 单片机 仿真 PCB
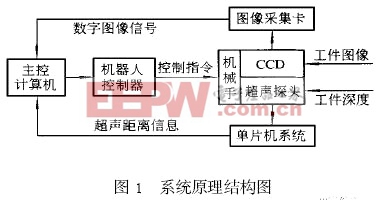
- 视觉传感器能直观反映物体的外部信息,但单个摄像头只能获得物体的二维图像,立体视觉虽能提供三维信息,但对于外形相同,仅深度有差别的物体难以识别(如有孔物体、阶梯状物等) ,且对环境光线有一定的要求. 由于超声传
- 关键字:
自动识别 系统 机器人 技术 视觉 超声 基于
- MCU(MicrocontrollerUnit)即单片机是大家都比较熟悉并常用的电子器件,由于其广泛的应用,所以用单片机设计电路是电子技术人员必备的技能。对于初学者,可以先从软件仿真入手。我们知道利用Proteus软件可以进行
- 关键字:
单片机 协同 仿真 进行 模块 Multisim10 MCU 利用

- TKScope嵌入式仿真开发平台加速您的设计,TKScope是广州致远电子有限公司2008年隆重推出上市的一款高性能通用型综合仿真开发平台,支持仿真全系列的8051、ARM、DSP、AVR、C166、C251、MX等内核;与当前全部主流IDE环境无缝嵌接,如Keil、ADS、IAR、CCS、RealView、AMRStudio、TKStudio等,保证您的开发平台始终如一,并具备其高级调试功能。同时,TKScope内嵌64路专业的逻辑分析仪,zlgLogic高级软件全面支持。
- 关键字:
加速 设计 开发平台 仿真 嵌入式 TKScope
机器人.仿真介绍
您好,目前还没有人创建词条机器人.仿真!
欢迎您创建该词条,阐述对机器人.仿真的理解,并与今后在此搜索机器人.仿真的朋友们分享。
创建词条
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司

京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473



