美国《大众机械》杂志网站近日对2010年的科技发展趋势进行了分析,并预测2010年或将取得重大研究进展的十大科技产品或科技概念,其中包括仿人机器人、“超级电容”动力汽车,和直接碳燃料技术等。
1. 仿人机器人仿人机器人
现有的机器人基本上是“金玉其外”,就算是外表与人类相似,但其体内仍是一堆堆的电线。不过,欧洲一支科学家团队正致力于缩小这种差距。他们研制的一种机 器人原型已经具备一定的仿人功能,其体内有一副由热
关键字:
机器人 芯片
在“2009中国机器人大赛暨RoboCup公开赛-服务机器人比赛”中,中科大自主研发的明星机器人“可佳”大放异彩、备受关注,它能与人对话,能理解 人们发出的指令,能开动脑筋自动规划复合任务最优解,能遵守“机器人三定律”。它的出现,让人们眼前一亮:也许就在不久的将来,这样聪明的“海螺姑娘”就 会来到我们身边,成为我们生活、工作中的好帮手。
展望:“海螺姑娘”将不再是传说
有
关键字:
中科大 机器人
0 引言
关键字:
LMS 自适应滤波器 仿真
我们研究了一种改进的加权融合算法,采用二次加权的方法,并引入了最优比例权重的概念,先对单个传感器进行加权,再对整体进行加权融合,目的是使算法性能达到最优。通过实验进行仿真,结果表明,算法稳定性较高,融合效果好。
关键字:
仿真 传感器 数据融合 权重 加权平均 200912
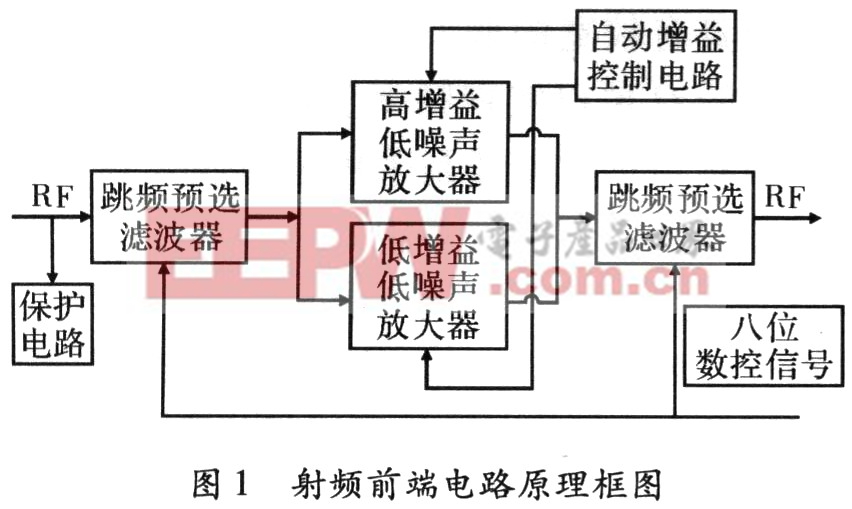
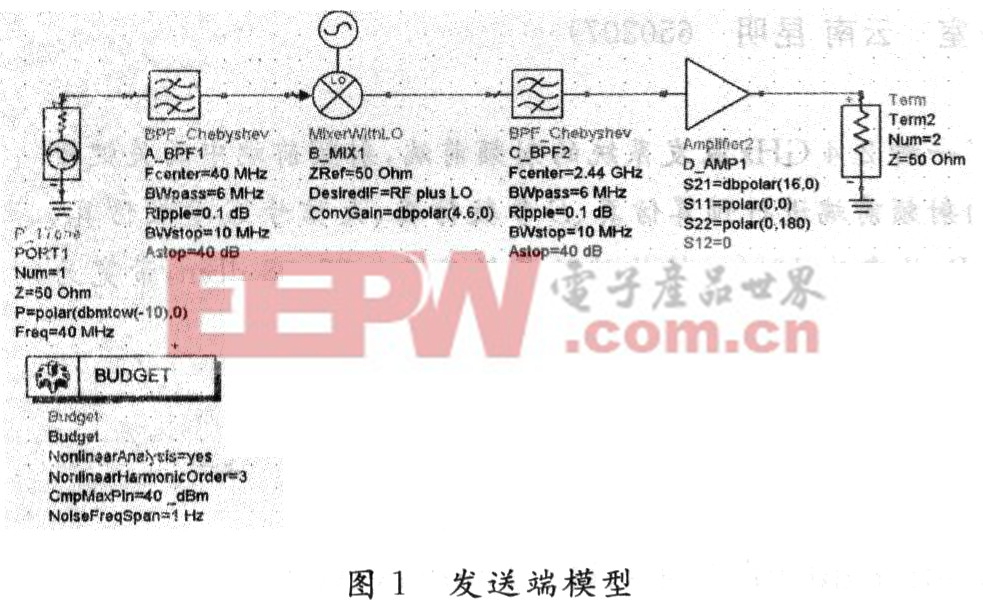
随着现代电子技术和无线通讯技术的飞速发展,无线电通信的应用越来越广泛,家用电器产品日益普及。射频前端作为接收机的重要组成部分,主要功能是将接收到的高频信号,转换成中频信号。射频前端电路对整个接收
关键字:
仿真 设计 研究 前端 射频 电台 接收机 VHF
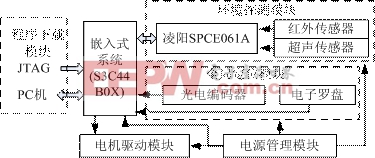
基于S3C44B0X的移动机器人的应用研究移动机器人利用导航技术,获得机器人的目前所处的位置,结合传感器技术对周围外界环境(障碍物等)作实时探测,并根据环境提供的信息规划一条可行路径完成达到目标点的任务。移动
关键字:
应用 研究 机器人 移动 S3C44B0X 基于
0 引言
关键字:
设计 仿真 控制器 适应 预测 控制 基于
Author(s):
关键字:
LabVIEW 机器人
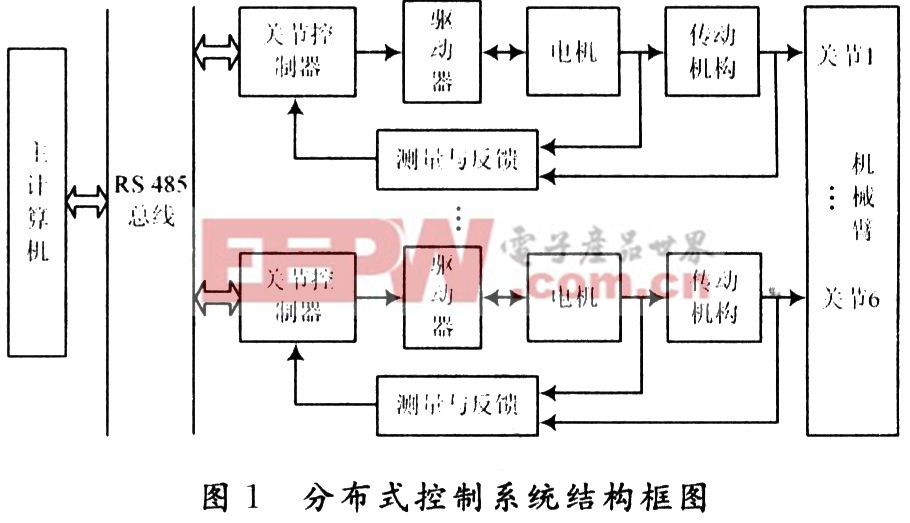
在具有32自由度仿人机器人中,为了每一个关节动作准确,可以采用分布式控制的体系结构。这里采用基于RS 485总线的TMS320F240DSP作为分布式关节控制器,非常适合于在机械臂内的狭小空间内安装,并进行增量码盘和速度检测电路的设计以及相应的软件设计等,完成了6个自由度机械臂分布式关节控制器设计,能够满足仿人机器人技术与系统的运动轨迹的要求。
关键字:
控制器 设计 关节 机器人 DSP 基于
LED是一种寿命长、功耗低、无辐射的节能环保型光源, 大多数专家预测21世纪将是以固体发光材料为核心的,即以LED为代表的新型光源、绿色照明的世纪,因此LED光源具有光明的前景。近年来,LED灯具产品开发的种类越
关键字:
仿真 研究 阵列 LED 照明
为了对自适应滤波算法的滤波性能进行分析,在自适应滤波理论研究的基础上,研究自适应滤波器结构及LMS自适应滤波算法。给出LMS算法的求解的公式,基于LMS算法求解公式,采用Matlab仿真和DSP软件编程两种方法实现了LMS算法,并给出了不同信噪比条件下,LMS算法的仿真实现的滤波结果及DSP实现的滤波结果,通过两种结果的比较可以看出,在信噪比较低的条件下,LMS算法工程上的滤波效果明显达不到理论上的滤波效果。该研究对于自适应滤波理论的工程应用,具有一定的指导作用。
关键字:
工程 实现 仿真 算法 滤波 适应
0 引 言
关键字:
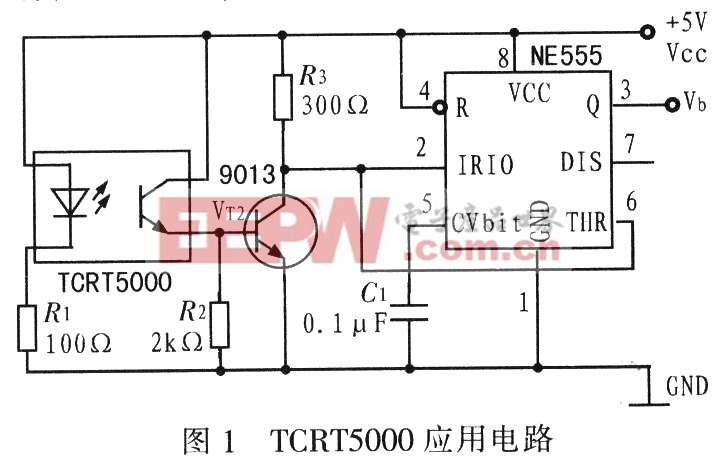
设计 研究 应用 仿真 电路 测试仪 电源 集成电路
0 引 言
关键字:
ADS 设计 仿真 前端 射频 收发 系统 GHz 射频
机器人.仿真介绍
您好,目前还没有人创建词条机器人.仿真!
欢迎您创建该词条,阐述对机器人.仿真的理解,并与今后在此搜索机器人.仿真的朋友们分享。
创建词条
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司
京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473