- 基于车辆动态称重系统的结构和特点,采用了一种基于最优加权平均的数据融合处理方法,将其应用到动态称重系统中,并完成系统的软硬件设计。通过对融合前后的实验数据进行比较分析,可有效地降低传感器在工作过程中受多种因素的交叉干扰影响,提高了车辆动态称重系统抗干扰能力,以保证参数检测的可靠性和准确性。
- 关键字:
动态称重系统
传感器
加权平均
数据融合
- 着重分析了两轮自平衡小车的设计原理与控制算法,采用卡尔曼滤波算法融合陀螺仪与加速度计信号,得到系统姿态倾角与角速度最优估计值,通过双闭环数字PID 算法实现系统的自平衡控制。设计了以MPU-6050传感器为姿态感知的两轮自平衡小车系统,选用8位单片机HT66FU50A为控制核心处理器,完成对传感器信号的采集处理、车身控制以及人机交互的设计,实现小车自主控制平衡状态、运行速度以及转向角度大小等功能。
- 关键字:
两轮自平衡
姿态检测
卡尔曼滤波
数据融合
PID 控制器
201603
- 在声发射检测中,为了达到较为精确的定位,通常采用时差定位方法,这就需要两个或两个以上的传感器组合使用。如平 ...
- 关键字:
声发射源
多传感器
数据融合
识别技术
- PNI总裁兼执行长Becky Oh发表该公司最新的进展──一款1.5x1.5x0.5mm的微型芯片,该芯片可以执行复杂的传感器 ...
- 关键字:
数据融合
MEMS
传感器
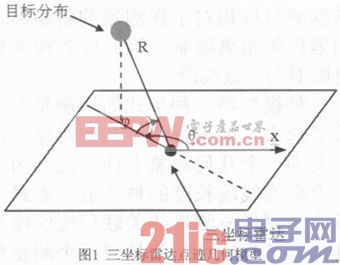
- 为了对付现代战争的“四大威胁”,采用分布式、多制式传感器组网对敌方目标进行探测已经变得十分必要,而多制式传感器组网的关键技术之一是数据融合问题。分析了三坐标雷达、两坐标雷达和红外探测器这三种常见种类的传感器点迹几何模型,提出了一种针对这三种不同制式传感器的数据融合算法,并在某工程中得到了成功应用。
- 关键字:
多制式
测量相关
航迹相关
数据融合
- 多传感器数据融合在漏磁信号采集与处理中的应用,中心议题多传感器数据融合技术能对缺陷信号作智能化处理电磁感应式传感器和霍尔传感器的工作原理采用小波去噪的方法,并利用RBF神经网络的数据融合技术对缺陷信号进行检测处理并得出仿真结果解决方案采用漏磁传感器阵
- 关键字:
多传感器
数据融合
漏磁
信号采集
- 2009年在武广、郑西等客运专线中,C3列控系统的应用,对高速铁路列车定位技术提出了更高的要求。C3列控系统...
- 关键字:
GPS
传感器
定位系统
数据融合

- 我们研究了一种改进的加权融合算法,采用二次加权的方法,并引入了最优比例权重的概念,先对单个传感器进行加权,再对整体进行加权融合,目的是使算法性能达到最优。通过实验进行仿真,结果表明,算法稳定性较高,融合效果好。
- 关键字:
仿真
传感器
数据融合
权重
加权平均
200912
- 电子产品世界,为电子工程师提供全面的电子产品信息和行业解决方案,是电子工程师的技术中心和交流中心,是电子产品的市场中心,EEPW 20年的品牌历史,是电子工程师的网络家园
- 关键字:
多传感器
数据融合
异步数据
- 1 引言
现代海战中,飞机或导弹的低空、超低空突袭,尤其是具有“低、小、快”战术特性的掠海导弹,对水面舰艇的安全构成极大的威胁。因受到地球曲率、多路径效应、背景杂波的影响,以及隐身技术的广泛采用,雷达在较远的距离,发现和稳定跟踪掠海导弹较困难,即使在近距离上发现和跟踪这样的高速目标,防御武器系统也很难有充足的反应时间。因此,水面舰艇探测系统必须解决好对低空掠海导弹的发现及稳定跟踪问题,保证舰载武器和系统能有效地拦截低空、超低空目标。
舰炮系统中一般配有火控雷达和光电系统等探测设备,这些传感
- 关键字:
工业控制
数据融合
雷达
工业控制
数据融合介绍
数据融合
数据融合一词始于 20 世纪 70 年代,在 90 年代以来得到较快发展。美国国防部实验室 专家组在其 1991 年出版的数据融合字典中,对数据融合的定义如下:数据融合是将多传感 器信息源的数据和信息加以联合、相关及组合,获得更为精确的位置估计及身份估计,从 而实现对战场态势和威胁以及其重要程度实时、完整评价的处理过程。
从物联网的感知层到应用层,各种信息的种类和数量都成 [
查看详细 ]
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司

京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473