基于ARM单片机的智能旋转倒立摆系统设计

3.3 运动控制模块硬件电路详细设计
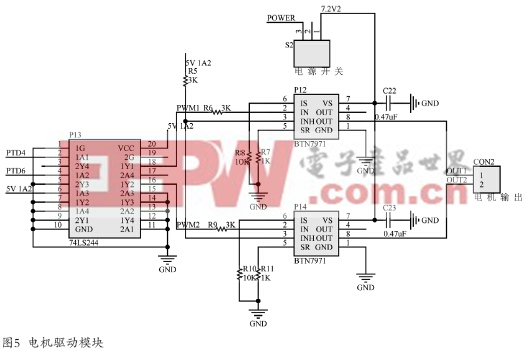
通过BTN7971芯片来驱动BN-260伺服电机。单片机的FTM通道输出PWM信号,就可以实现伺服电机的调速以及正反转等功能。电路如图5所示,74LS244暂存器的应用能够有效保护电机[3]。K60单片机输出的PWM信号具有很高的控制精度,设置其PWM分度为两万分之一。
4 控制PID算法分析与应用
针对本系统控制对象伺服电机的特点,采用位置式按角度偏差的比例、积分、微分进行控制,即增量式数字PID控制。
数字PID控制算法是以模拟PID调节器控制为基础的,由于单片机是一种采样控制。它只能根据采样时刻的偏差计算控制量。但是如果采样周期T取得足够小,采样数值计算的方法逼近可相当准确,被控过程与连续控制十分接近。离散化后的PID算式为:
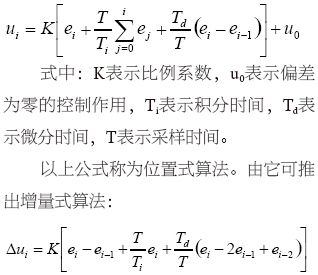
本系统中采用增量式算法,是由于增量式算法只需保持以前三个时刻的偏差即可,既节省了资源又不会产生较大的积累误差。实验证明,这种控制方式可以加快系统阶跃响应、减小超调量,并具有较高的精度。
5 软件设计与分析
设置拨码开关,拨码开关四位信号输入给单片机,单片机通过模式判断运行相应程序,进而完成六种控制形式。主控制程序流程图如图6。
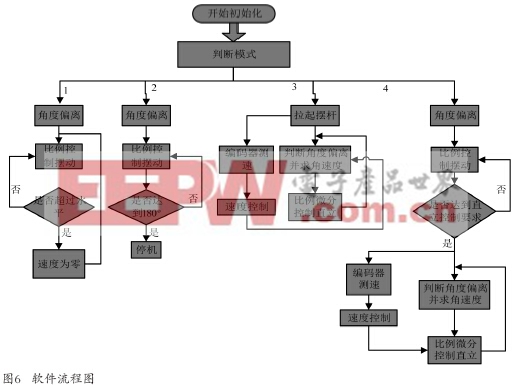
五种控制模式的算法如下:
1)要求 (1)、(2)项采用比例控制,将角度设定值与一号测角导电塑料电位器输入的倒立摆角度值做差,乘以比例系数并经过转换后即为控制电机的PWM信号。公式为:
PWM值=标准值±比例系数KP *(角度设定值-角度测量值)/2。

pid控制相关文章:pid控制原理
pwm相关文章:pwm是什么
伺服电机相关文章:伺服电机工作原理
pid控制器相关文章:pid控制器原理
低通滤波器相关文章:低通滤波器原理
加速度计相关文章:加速度计原理










评论