基于Taylor展开法整定MIC-PID控制器参数

3 控制过程仿真
设被控过程对象模型为:
设被控过程对象模型为:
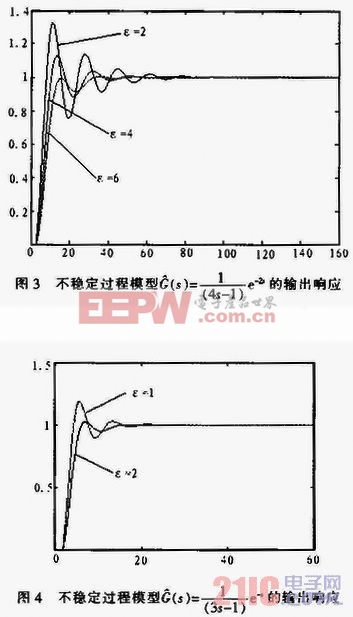
由图3和图4可见,如果纯滞后时间变小有利于系统稳定,纯滞后时间变大则系统容易发散,因此在整定参数时,可以人为地将延迟时间加大,以防止参数摄动时,系统不稳定。
4 结论
文中采用内模控制原理,针对一类不稳定时滞过程,采用双环控制结构,首先使广义对象(内环)稳定,然后按内模控制原理设计外环控制器,利用Taylor级数展开法得到了PID参数整定公式。通过仿真实例对IMC-PID控制器进行验证,结果表明在IMC-PID控制器的作用下被控系统不但具有良好的鲁棒性,而且调节快速,便于实际系统应用。

pid控制器相关文章:pid控制器原理










评论