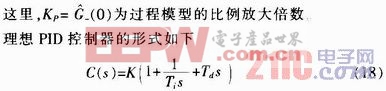
基于Taylor展开法整定MIC-PID控制器参数 作者: 时间:2012-07-24 来源:网络 加入技术交流群 扫码加入和技术大咖面对面交流海量资料库查询 收藏 <a href='https://ad.eepw.com.cn/www/delivery/ck.php?n=a635e61e&cb=INSERT_RANDOM_NUMBER_HERE' target='_blank'><img src='https://ad.eepw.com.cn/www/delivery/avw.php?zoneid=88&cb=INSERT_RANDOM_NUMBER_HERE&n=a635e61e' border='0' alt='' /></a> <a href='https://ad.eepw.com.cn/www/delivery/ck.php?n=a576c0a2&cb=INSERT_RANDOM_NUMBER_HERE' target='_blank'><img src='https://ad.eepw.com.cn/www/delivery/avw.php?zoneid=87&cb=INSERT_RANDOM_NUMBER_HERE&n=a576c0a2' border='0' alt='' /></a> 步骤2:IMC控制器设计 在设计内模控制器时,需在最小相位的上增加滤波器,以确保系统的稳定性和鲁棒性。定义内模控制器为 上面的公式可以用来求取控制器的增益、积分时间和微分时间,这些参数是过程模型参数和IMC滤波器时间常数的函数。 pid控制器相关文章:pid控制器原理 上一页 1 2 3 4 下一页
 上增加滤波器,以确保系统的稳定性和鲁棒性。定义内模控制器为
上增加滤波器,以确保系统的稳定性和鲁棒性。定义内模控制器为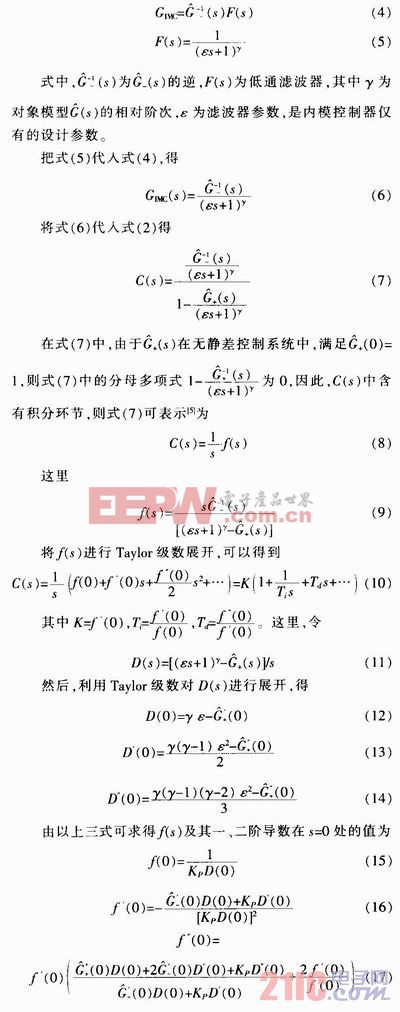












评论