2 MIC-PID控制器参数的整定
设一阶不稳定时滞过程为:
 本文引用地址:https://www.eepw.com.cn/article/160269.htm
本文引用地址:https://www.eepw.com.cn/article/160269.htm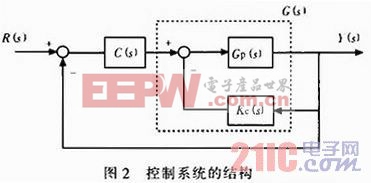
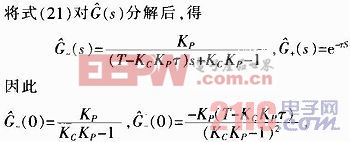
对式(20)分母中的纯滞后环节采用一阶Taylor逼近得
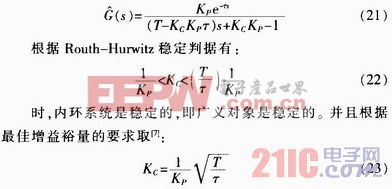
从式(22)可以看出纯滞后时间必须小于时间常数,即必须满足τ≤T,否则等效对象是不稳定的,由此可见,这一结果不适合大纯滞后对象。
经过内环参数整定后,内环路可以用一个等效稳定对象G(s)来代替,如果外环路采用内模控制方法,则控制系统的等效框图仍如图1所示。

这里,αa一般取O.05至0.1之间的某个常数。
pid控制器相关文章:pid控制器原理












评论