ARM设计的FPGA可重构配置方法的实现及应用

{p ntf(”、n\r—Configure Ermr:nsrATus is O!、n、r );
retum O;}}
else if(Read—nC0NF—Done)
{p ntf(”\n\卜-Co gure success! 、n );}
fnr(i=O;i(5O;i++)/ 初始化 /
{Set—DcLK(1);
hudeIay(1);
Set— DCLK(O);
hude1.dy(1);} 、
if(!Read—nC0NF—D0ne)
{printf(”、r\n—configure En r:nCO F—Done is 0 1”);
retum 0:}
retum l:
{
结合上述可重构配置分析,我们利用了FPGA可重构特性,实现模块化机器人控制器的设计.模块化机器人结构复杂,控制电机数量多,而且针对不同构形控制策略也有差别,如四自由度串联式机器手构形和全向移动小车构形(图4所示)从控制策略到控制电机数量都有很大的不同,这就要求控制器可以根据不同构形动态的改变控制策略,也即控制器的可重构.为此,在模块化机器人可重构控制模块结构设计中,提出基于ARM和FPGA的动态可重构的模块化机器人控制系统方案,充分利用嵌入式ARM核微处理器高性能、低功耗、资源丰富等方面的性能和FPGA内部逻辑可重构的特性,由主处理器根据机器人当前构形选择不同的控制策略并对FPGA内部逻辑进行动态重配,以适应不同构形及应用的需要.结构设计框图如图5所示。

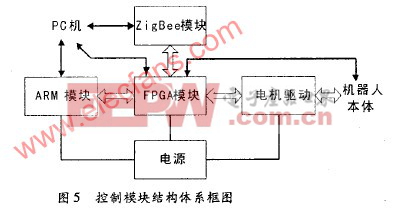
ARM模块选用s3c241Ox运行 C/OS—II实时操作系统,负责运行控制软件,完成模块化机器人运动规划,实时监控系统运行状态,实现人机交互功能及对FPGA内部逻辑实时重构.FPGA内部运行软核处理器,负责与模块化机器人运动控制相关的任务,如舵机控制、直流电机控制、系统IO控制、传感器数据采集等任务.
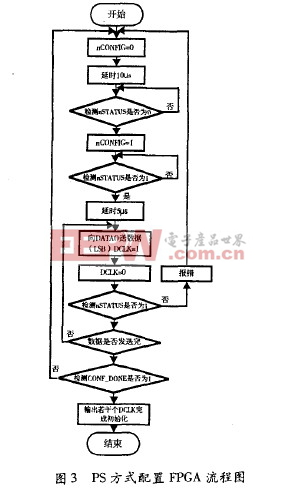
对FPGA配置采用上述基于ARM的PS配置方法,平台充分利用了FPcA内部逻辑可重构的特性,可组成多种不同构形,不同构形具有不同的物理结构和控制方式,以满足不同任务需求.其重构方法采用:
(1)根据具体构形规划系统硬件资源种类,如构形需要的直流电机数量、舵机数量、系统I/,O数量以及各种传感器的数目.
(2)根据硬件资源种类修改FPcA内部逻辑,实现硬件层次的“重构”.
(3)根据FPGA逻辑的变化,进行软件的开发,实现软件层次的“重构”.
(4)将FPGA配置文件下载到ARM的存储器中,系统上电后,ARM结合需求通过读取相应存储区的配
置文件对FPGA进行配置,实现控制系统的动态重构.
经过实验验证,利用ARM的实时处理功能,对FPGA内部逻辑进行动态重配,所设计的控制平台可以满足可重构配置的性能要求.
4 结语
文中给出了基于ARM的FPGA的Ps加载配置方案,该方法电路结构简单、易于实现,充分利用ARM处理器功能强、速度快、应用广的特点,在系统中可预先包含多个不同功能的配置文件,根据现场的需要进行相应的配置,实现在线更新FPGA功能,既节省了开发成本,又满足了一些特殊的系统设计要求,也充分显示出FPGA现场升级、灵活运用的设计理念,方案的提出,对嵌人式数字系统设计具有相当的借鉴意义.











评论