基于ARM的嵌入式系统设计

2 系统硬件设计
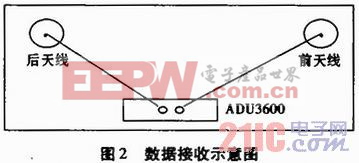
2.1 数据接收电路
选用的GPS天线为零相位测量型天线,馈线与天线在阻抗、增益、放大倍数等方面与标配的天线有很好地匹配。
前天线:用天线馈线一端连接接口,另一端连接GPS前天线(前进方向)。
后天线:用天线馈线一端连接接口,另一端连接GPS后天线(后退方向)。
GPS后天线相位中心到GPS前天线相位中心的连线我们称为基线。基线与真北间的夹角我们称为方位角。基线越长定向精度就越高,通常基线长度增加一倍,定向精度也会提高一倍。应尽可能将两个天线安装间距拉长,这样可提高定向精度。本文引用地址:https://www.eepw.com.cn/article/149262.htm
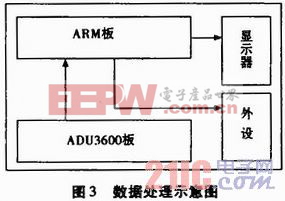
2.2 数据处理电路
接收板通过两条GPS天线接收到数据后,进行第一次数据处理、分类、打包等,然后通过串口把处理后的数据经由母板传送给主板,主板接收到数据后,进行第二次数据处理、分类、打包等一系列工作,最后通过显示屏把相应的数据进行显示,并同时通过串口经由母板把数据发送给外设。







评论