分布式多视角目标跟踪算法在OMAP3平台上的实现与优化

本系统采用“一种基于最大似然的分布式多视角目标跟踪算法”[1-5],是复旦大学信息学院数字信号处理与传输实验室的最新研究成果,本系统在已有跟踪算法的基础上进行移植和优化裁减,通过序列蒙特卡洛方法[7-8]来具体实现数据融合,比较好地解决了视频跟踪中常见难题比如遮挡等,取得了较好跟踪效果。本系统算法具有如下特点:
⒈采用鲁棒的结构相似度作为匹配程度的度量;
⒉基于最大似然多视角信息融合及遮挡处理;
⒊序列蒙特卡洛方法(粒子滤波);
⒋分布式跟踪系统;
⒌动态模板更新:抑制漂移的带掩蔽卡尔曼外观滤波算法。
3.1 视角内模板匹配
本文中单个视角内基本跟踪算法是一种基于模板匹配(Template Matching, TM)技术的跟踪算法,即在手工选定或自动选定了待跟踪目标后,提取目标的外观信息作为模板,在后续的视频序列中,将候选图像区域与目标模板进行匹配,找到最相似的图像区域,作为目标的位置所在。本文中采用结构相似度指数[6](SSIM)作为模板匹配的指标。SSIM是对于两幅图像之间差异的客观描述,它考虑了很多人类视觉系统的特性。人类视觉系统在提取场景中的结构信息上比较敏感,考虑到这一点,结构相似指数就是基于结构信息的退化性。
3.2 基于粒子滤波的视角间信息交互
本系统中采用具有分布式特点的多视角目标跟踪算法。该算法首先对多视角目标跟踪进行建模,将各摄像机视野中目标位置的估计转化为基于最大似然准则的估计问题,并将似然函数分解成本地似然函数和远程似然函数乘积的形式。每台摄像机节点首先需要利用本地图像数据计算出本地似然函数,再借助于消息传递机制计算出远程似然函数,最后对两者进行数据融合,无须预先进行遮挡检测,即可完成每台摄像机对目标的准确跟踪。
本系统针对多个静止摄像头Ci (i=1,2,3⋯N)观测待跟踪目标O,在t时刻任意一台摄像机采集到的图像数据表示为)...3,2,1( Niit=z,跟踪目标在该图像中的真实位置横纵坐标表示为],[′=ititityxx。整个跟踪系统的任务是利用该时刻采集到的图像数据集合{}NttttzzzZ...,21=,估计出运动目标在每台摄像机视野中所处的位置)...2,1(],[Niyxititit=′=x。根据最大似然准则,可将本文的目标跟踪任务以如下形式进行建模:
经过推导[1]可以得到系统模型似然可分解为如下形式:
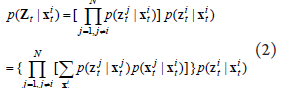
式(2)所表示的物理意义为:本地似然函数)|(ititpxz是第i台摄像机利用本地数据对运动目标位置itx进行估计,可理解为一般的单摄像机跟踪过程;而远程似然函数)|(itjtpxz则可以理解为本地摄像机节点Ci通过一个数据融合的过程,融合其它摄像机节点的观测数据来提高对运动目标的位置itx估计的精度。
本系统采用粒子滤波的形式来实现似然函数的传递,经过推导可以得到粒子滤波的权重中包括了远程信息及本地信息两个部分,与公式(2)保持一致,可以很好地实现数据融合。









评论