语音控制的智能小车设计

1 智能小车总体结构框图
智能小车主要由转向机构、驱动机构、转向控制模块、驱动控制模块、遥控模块和语音控制模块六大部分组成,如图1所示。
2 机械本体结构及工作原理
小车为轮式结构,如图2所示。机械部分分为转向机构(图中椭圆内的部分)和驱动机构(图中椭圆外部分)。转向机构主要由转向电机、转向架和两个前轮组成。驱动机构采用玩具小车常用的双电机驱动方案,包括两个减速电机和两个后轮。转向机构工作原理为:转向时由控制者向小车发出转向信号,转向电机根据转向信号正向或反向旋转一定角度,电机通过齿轮、齿条系统带动转向架摆动一定角度,最终带动与转向架固定在一起的前轮偏摆一定角度。小车在转向时由于内、外侧的车轮的转弯半径不同,所以内外侧车轮的转速也不相同。前轮为从动轮,会根据转弯角度的大小自动调节内、外侧车轮的转速;而后轮为主动轮,其转速分别由两个电机独立驱动,不会根据转弯半径自动调节转速。因此小车转弯时,控制系统在控制转向电机的同时还需要根据转向角度的大小向两个驱动电机发出控制信号,调节两个驱动电机的转速使之产生特定的转速比,从而使转弯顺利进行。在这里,转弯的角度、转速比与小车的尺寸及转弯半径有关。
3 控制系统
控制系统包括两大部分,一部分位于遥控器内,用于识别控制者的命令并将响应的控制信号发送出去;一部分位于小车上,用于接收遥控器发出的控制信号,并根据控制信号控制转向机构和驱动机构,使小车实现预期的动作。
3.1 遥控器
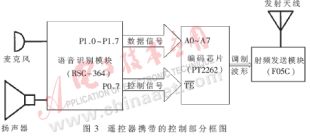
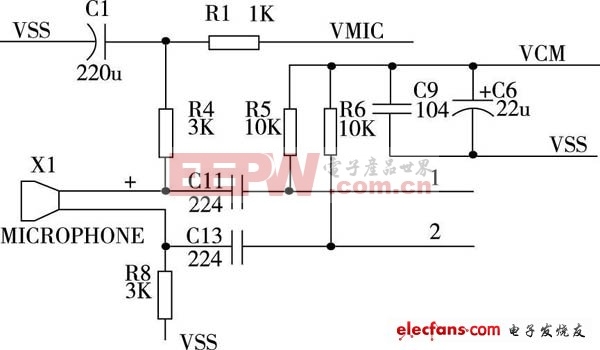
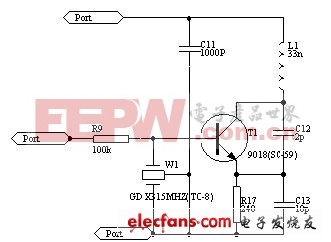
遥控器主要由语音识别模块和无线发送模块(编码芯片、射频发送模块)组成,如图3所示。遥控器的工作原理为:控制者通过麦克风发出控制命令,该命令经过语音识别模块识别后,根据控制信号的类型产生一个8位的控制码,语音识别模块通过其P1端口将控制码输出至无线发送模块,然后语音识别模块发出控制信号,控制无线发送模块将该控制码以无线电波形式发送出去,车载控制部分接收到后便控制小车产生预期的动作。







评论