基于虚拟仪器的雷达信号模拟系统的设计

1 引言
传统的雷达发射机,采用专用的信号发生模块,无法任意的设置波形形式、参数,信号中心频率,信号功率等。在一定程度上限制了应用范围。尤其在雷达的预研和新技术的探索阶段,要对各种雷达信号进行实验或评估,如果为每种雷达信号设计专用的信号发生模块,将极大的耗费成本。如果使用虚拟仪器技术,集成高性能的商用测试仪器[1],通过编程设计系统的功能,可以有效模拟多种雷达信号,并以较大的灵活性对雷达信号的参数进行设置,克服通用性差的问题,满足多种多样的应用要求。
2 雷达信号发生系统
雷达信号产生原理方框图如图1所示,基带信号发生模块利用D/A变换,将数字存储波形转换为I/Q两路基带模拟信号输出。I/Q调制模块对I/Q两路信号进行正交载波的调制,将信号中心频率搬移到射频或微波频段,系统最后的输出就是所需的雷达信号。
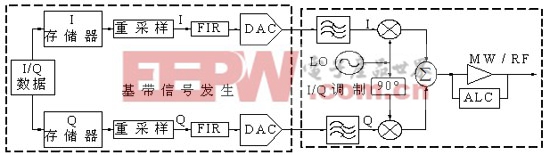
图1. 雷达信号产生原理图
3 基于虚拟仪器的雷达信号模拟系统
在雷达新体制的预研论证阶段,利用基于虚拟仪器的雷达信号发生系统,可以满足应用需求。利用任意波形发生器、矢量信号源以及脉冲信号源作为硬件平台,在Agilent VEE下开发虚拟仪器软件进行控制,实现了通用雷达信号发生系统的模拟。
3.1 系统的硬件结构设计
系统的结构图如图2 所示,下面介绍各模块的功能。
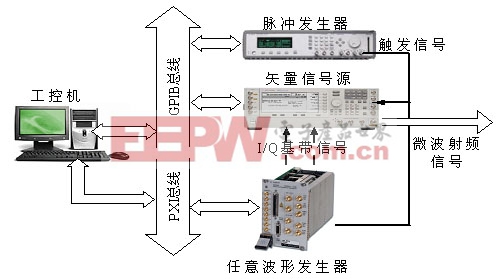
图2. 仪器的硬件连接
3.1.1 任意波形发生器
任意波形发生器通过数字存储,数模转换的功能完成基带或中频模拟IQ信号的输出。通过软件控制,任意波形发生器模拟基带模拟信号发生模块,实现如下功能:
1. 对脉冲波形的输出进行回放控制,实现单脉冲波形或脉冲波形序列的输出。
2. 并可以设置脉冲时间的宽度,脉冲内的波形参数(如频率或带宽等)。
3. 脉冲时间宽度,重采样速率可以通过软件进行设置。
3.1.2 矢量信号源
矢量信号源输入I/Q信号完成正交调制,上变频的功能。通过远程控制实现如下功能:
1. 可以调节输出雷达信号中心频率以及输出功率的大小。
2. 可以调节I/Q两支路的幅度和相位平衡。
3.1.3 脉冲发生器
脉冲发生器可以为雷达脉冲调制提供所需的触发脉冲,并进行脉冲重复频率PRF 的设置。实现各个模块之间的相参和同步。
上述系统中的关键模块是任意波形发生器和矢量信号源。各大仪器产商都有相应的产品。为了验证实现该系统,我们选用了安捷伦公司的任意波形发生器 N6030A[2]和矢量信号源E8267D[3],并选用该公司的81110A脉冲发生器[4]作为脉冲源。其中81110A和E8267D通过 GPIB总线与工控机连接,N6030A则通过PXI总线与工控机相连。工控机运行虚拟仪器软件,通过PXI总线与GPIB总线分别与各个仪器通信,实现对仪器的远程控制。
3.2 虚拟仪器软件设计
系统软件组成如图3所示,采用模块化的程序结构,方便系统的升级和扩充。仪器驱动程序是仪器功能控制函数以及仪器参数变量的集合。仪器控制模块是由程序定义的仪器驱动程序的子集,它将构建系统需要的仪器功能函数和参数从驱动程序中提炼出来,以适合用户的需求。
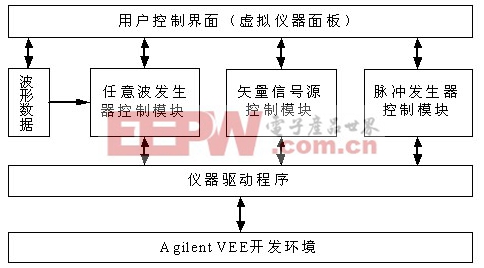
图3. 系统软件组成框图
3.2.1 VEE图形化开发环境
虚拟仪器开发环境包括常见的应用程序开发环境如:VC++,VB,MATLAB,以及专门针对测试测量应用的图形化开发环境:NI LabVIEW, Agilent VEE等。
在开发过程中,选用Agilent VEE (Virtual Engineering Environment) 开发环境[5]。VEE采用面向对象的程序设计技术,适合于测试和测量领域的系统仿真与仪表备优化控制等应用。它的主要特点有:对编程语言进行了的图形化处理,采用数据流程图方式编写代码,编程效率高。提供了丰富的仪器I/O驱动实现对VXI、GPIB、PXI、串口等总线接口的控制。提供了大量的函数库,并可以与C /C++,MATLAB等进行混合编程。
3.2.2 基于驱动程序的仪器控制模块设计
仪器驱动程序是实现仪器功能的控制函数和参数的集合。它是软件与仪器通信的桥梁。仪器都在出产时随产品附带了相应的驱动程序,而虚拟仪器软件建立在仪器驱动程序之上[6],通过接收用户操作面板传来的用户设置参数,实现丰富的信号设置功能,完成自动控制的任务。 通过调用仪器驱动程序的接口函数 [7], [8], [9]可以设计出符合功能需求的系统。
图4说明了软件的流程。软件的功能包括仪器的寻址,仪器间的相参设置,重采样时钟设置,每一级输出功率配置,触发源的选择,触发脉冲PRF值的配置,输出信号中心频率的配置,信号波形的建模,数据生成和存取,以及波形的输出回放控制。其中波形回放控制部分是一个子进程,其流程图如图5所示。它的功能是通过调用任意波形发生器驱动程序的函数,控制任意波形发生器的波形回放过程。两个分支分别实现单一脉冲波形的输出和脉冲波形序列的输出。
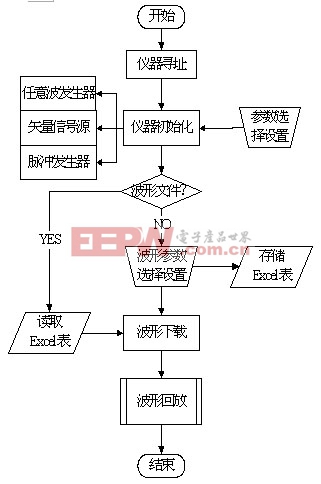
图4 虚拟仪器程序执行流程图
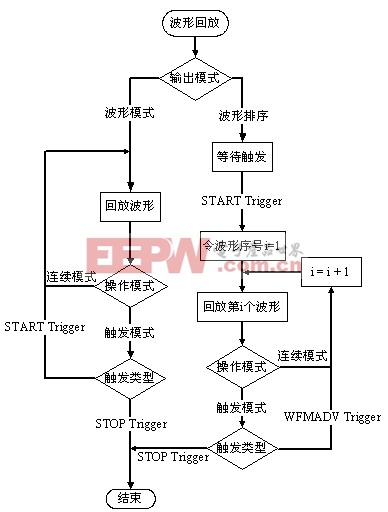
图5. 波形回放流程图
图6是任意波形发生器在单一波形输出模式下时,在PRF = 2000KHz的触发脉冲控制下,输出的I/Q两路线性调频基带(-300~+300MHz)模拟信号在数字存储示波器上显示的图像。触发脉冲宽度为300us,脉冲波形宽度为16us。
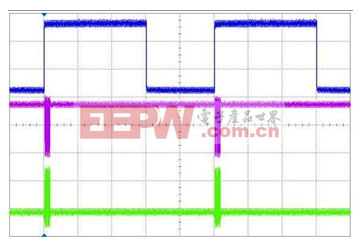
a. 时间轴分辨率100us/格
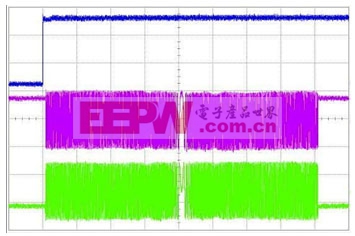
b. 时间轴分辨率2.00us/格
图6. 线性调频信号及触发脉冲
4 结束语
基于虚拟仪器的雷达信号模拟系统较之以往的专用雷达信号系统有以下几个创新点:
1) 通用性:波形信号形式,中心频率,功率,脉冲重复频率等都可以进行很灵活的设置。
2) 软件定义系统功能,方便系统的升级,容易集成其它仪器仪表到系统中,扩充系统功能。
3) 充分利用实验室资源,降低研发成本和周期,适用于雷达系统新体制的研发和实验阶段





评论