CAN现场总线在电动汽车控制系统中的应用

CAN现场总线是20世纪80年代初德国BOSCH(博世)公司在为解决汽车中众多的控制与测试仪器之间的数据交换而开发的一种通信协议。由于CAN总线具有突出的可靠性、实时性和灵活性,因而得到了业界的广泛认同和运用,并在1993年正式成为国际标准和行业标准,被誉为“最有前途的现场总线”之一。以CAN为代表的总线技术在汽车上的应用不但减少了车身线束,也提高了汽车的可靠性。在国外现代轿车的设计中,CAN已经成为必须采用的技术,奔驰、宝马、大众、沃尔沃及雷诺等汽车都将CAN作为控制器联网的手段。我国目前CAN总线技术在汽车上的应用存在着很大的空白,在电动汽车上应用CAN总线技术研究尚处于起步阶段。
电动汽车融合了许多的电子控制系统,如电池管理系统、电机控制系统、驱动控制系统、再生制动系统及ABS系统等。电子设备的大量应用,必然导致车身布线增长且复杂、运行可靠性降低、线路上的功率损耗加大、故障维修难度增大。特别是电子控制单元的大量引入,为了提高信号的利用率,要求大批的数据信息能在不同的电子单元*享,汽车综合控制系统中大量的控制信号也需要实时交换,传统线束已远远不能满足这种需求。将CAN总线技术引入电动汽车可以克服以上缺点,具有广阔的应用前景。文中将CAN总线技术应用到电动汽车控制系统,并采用通用扩展单元解决电动汽车电控系统的电路设计复杂性的问题,优化组合各电控单元信息以实现充分信息共享,达到提高电动汽车控制系统性能的目的。
二、CAN总线的特点
CAN属于现场总线范畴,是一种有效支持分布式控制或实时控制的串行通信网络。CAN总线在工业控制领域广泛应用得益于其自身的技术特点。
(1)只需通过报文滤波即可实现点对点、一点对多点及全局广播等几种方式传送接收数据,无须专门的“调度”。
(2)通信方式灵活。CAN为多主方式工作,网络上任一节点均可在任意时刻主动地向网络上其他节点发送信息,而不分主从且无须站点地址等节点信息。
(3)CAN采用非破坏性总线仲裁技术,当多个节点同时向总线发送信息时,优先级较低的节点会主动地退出发送,而最高优先级的节点可不受影响地继续传输数据,从而大大节省了总线冲突仲裁时间,尤其在网络负载很重的情况下也不会出现网络瘫痪情况。
(4)采用短帧格式通信,传输时间短,受干扰概率低,具有极好的检错效果。每帧字节数最多8个,可满足通常工业领域中控制命令、工作状态及测试数据的一般要求。同时,8B也不会占用过长的总线时间,从而保证了通信的实时性。
(5)CAN的每帧信息都有CRC校验及其他检错措施,保证了数据通信的可靠性。
三、CAN总线在电动汽车上的应用
CAN总线应用于电动汽车上具有以下优点。
(1)减少各功能模块所需的线束数量和体积。
(2)减少整车质量并降低汽车成本,具有较高的数据传输可靠性和安装便捷性,扩展了汽车功能。
(3)一些数据如车速、电机转速和SOC等能够在总线上共享,因此去除了冗余的传感器,使传感器信号线减至最少,控制单元可做到高速数据传输。
(4)可以通过增加节点来扩展功能,如果数据扩展增加新的信息,只需升级软件即可。
(5)实时监测并纠正由电磁干扰引起的传输错误,并在检测到故障后存储故障码。
目前存在的多种汽车网络标准,其侧重的功能有所不同,为方便研究和设计应用,SAE车辆网络委员会将汽车数据传输网划分为A、B、C3类。
A类面向传感器/执行器控制的低速网络,数据传输位速率通常只有1~10kb/s。主要应用于电动门窗、座椅调节和灯光照明等控制。
B类面向独立模块间数据共享的中速网络,位速率一般为10~100kb/s。主要应用于电子车辆信息中心、故障诊断、仪表显示和安全气囊等系统,以减少冗余的传感器和其它电子部件。
C类面向高速、实时闭环控制的多路传输网,最高位速率可达1Mb/s,主要用于悬架控制、牵引控制、先进发动机控制和ABS等系统,以简化分布式控制和进一步减少车身线束。到目前为止,满足C类网要求的汽车控制局域网只有CAN协议。
四、方案设计
1. 系统原理图
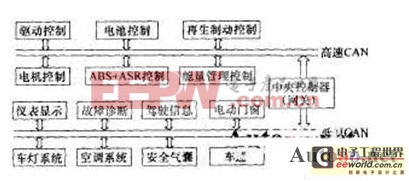
图1为电动汽车CAN总线控制系统原理图












评论