基于MTI技术改善雷达识别目标性能方法

摘要 为提高雷达对低空或海面快速运动目标的检测和连续跟踪测量的能力,论述用基于MTI技术对固定目标、海杂波进行相位对消,以在最大程度上对其进行衰减,使运动目标的回波得以保留,从而实现对运动目标的快速检测与跟踪测量。
关键词 动目标指示;目标识别;脉冲对消器
1 多普勒处理和运动目标指示概述
多普勒处理是指对接收到来自某一固定距离单元、一段时间内的信号进行滤波或谱分析处理。一般来说,来自一个距离单元的慢时间信号的频谱包含着噪声、杂波以及一个或多个目标信号。接收机噪声在整个频谱范围内均匀分布。杂波占据了谱的一部分。谱中以杂波作为主要干扰的部分通常称为杂波区,以噪声作为主要干扰的谱区称为清洁区。杂波区和清洁区之间的过渡部分被定义为过渡区。在过渡区内,噪声和杂波都是主要的干扰源。静止目标出现在零多普勒频率处,而运动目标出现在谱的任何位置,这个位置取决于目标相对于雷达的径向速度。多普勒处理用于在多普勒域分离目标和杂波信号。杂波信号可以被直接滤除,保留下来的目标信号便成为最强的信号,或把多普勒谱直接计算出来,而位于杂波区外的目标信号就可根据超过噪声电平的频率分量被检测出来。
运动目标指示(MTI)是指完全在时域对慢时间信号进行处理。而脉冲多普勒处理是指在多普勒域对信号进行处理。MTI处理只需较低的运算量,但其获得的信息较为有限。脉冲多普勒处理要求较大的运算量,但能获得更多信息和更高的信干比。为便于把高速目标从静止目标和相对低速的目标中分离出来,以利于快速准确捕获和测量目标运动参数,需要采用MTI+多普勒处理的方式对接收机所接收的信号进行处理。
2 MTI的基本原理
雷达接收到的由M个连续脉冲组成的回波信号,经相干解调后的基带数据形成的一个二维数据矩阵,此矩阵对应雷达三维数据块的一个二维水平切面。也就是说,对每个天线,相位中心都接收一个类似的数据矩阵。对于一个单孔径天线系统或阵列天线的某一固定波束形成输出,只能形成单个二维数据矩阵。
二维数据矩阵中的每个列对应于对一个脉冲的连续采样,即连续的距离门。列中的每个元素都是一个复数,代表一个距离单元的实部和虚部分量。因此,二维数据矩阵中的每一行代表对同一个距离单元的一连串脉冲测量。快时间或距离维的采样率至少为发射脉冲的带宽,因此其量级为几百kHz到几十甚至几百MHz之间。慢时间或脉冲数维按雷达的脉冲重复间隔进行采样。因此慢时间维的采样率为PRF,其量级为几kHz到几十kHz,有时达到几百kHz。多普勒滤波是对矩阵的行数据进行操作。
MTI处理器对慢时间数据序列执行一个线性滤波处理,以抑制数据中的杂波分量。利用平台运动和场景的几何信息把杂波多普勒谱中心搬移到零多普勒谱频率处。然后利用高通滤波完成杂波衰减,保留了位于多普勒清洁区中的运动目标。MTI滤波和目标检测过程如图1所示。

经过高通MTI滤波器的输出成为一个新的慢时间信号,它包含噪声以及可能存在的一个或多个运动目标信号。此慢时间信号再经过一个门限检测器。如果MTI滤波输出的信号幅度超过检测门限,则表明目标的存在。在MTI处理中只能给出目标是否存在的判决信息,并没有提供任何关于目标多普勒频率的估计信息,也没有提供目标径向运动方向的正负号信息。也就是说,它能够判断目标的存在,但不能确定目标多普勒频率的大小和方向。而且,它也不能提供目标存在的数目信息。如果多个运动目标同时存在于某个特定距离单元的慢时间信号中,MTI处理结果也仅给出“目标存在”的判决。另一方面,MTI处理简单、运算量较低。尽管处理形式简单,但一个精心设计的MTI处理器还是能够使信杂比(SNR)改善几dB到20dB。对于某些杂波环境,如海杂波影响强烈的区域,甚至能改善更多。
3 MTI设计的主要任务与仿真分析
MTI设计的主要任务是选择所要使用的特定滤波器。典型的MTI滤波器是一个低阶、简单的形式。实际上,许多普通的MTI滤波器都是基于简单的探索式设计方法。假设一个固定雷达照射一个被理想静止杂波包围的运动目标。对于每个脉冲,其回波信号中的杂波分量都相同,而运动目标分量的相位会随距离的变化而改变。对连续脉冲对的回波进行相减,就可以完全对消杂波分量,而目标信号由于其相位的改变,通常不被对消掉或不被完全对消掉。因此,实现MTI的关键是设计合适的脉冲对消器。
3.1 脉冲对消处理原理
当固定目标、海杂波与运动目标处于同一距离单元时,前者的回波通常较强,以至于运动目标的回波被“淹没”其中,故必须设法对二者进行区分。因固定目标回波中的多普勒频率为零,慢速运动的杂波中所含的多普勒频率也集中在零频附近,它们的回波经相位检波后,输出信号的相位将不随时间变化而变化或仅随时间作缓慢变化,反映在幅度上则为其幅度不随时间变化而变化或随时间缓慢变化。相反,运动目标回波经相位检波输出后,因其相位随时间变化较大,反映在幅度上也是其幅度随时间变化而变化。因此,若将同一距离单元在相邻重复周期内的相位检波输出作相减运算,则固定目标回波将被完全对消,慢速杂波也将得到很大程度的衰减,只有运动目标回波得以保留。显然这样便可将固定目标、慢速杂波与运动目标区别开。这就是MTI对消的基本原理。
3.2 脉冲对消器
为便于对脉冲对消器的基本原理进行理解,下面分别以二脉冲对消器和三脉冲对消器为例进行分析。图2为二脉冲对消器的流程图。
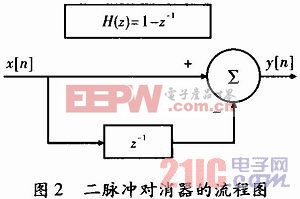
图2中,输入数据为对同一距离单元连续脉冲采样的基带复数据序列。x[n]是一个离散时间序列,其有效采样时间间隔t等于脉冲重复间隔。此线性有限冲激响应滤波器的系统函数为H(z)=1-z-1。把z=ej2πft代入系统函数中,得到以模拟频率F为变量的频率响应函数,即

式(1)中,二脉冲对消器确实在零多普勒频率处起到了抑制杂波能量的作用,使得运动目标的谱分量或被部分衰减,或被放大,被衰减或被放大最终取决于谱分量在多普勒轴中的准确位置。






评论