基于ARM内核单片机的四旋翼直升机飞行控制系统设计

摘要:四旋翼直升机具有4个呈交叉结构排列的螺旋桨,其独特的构型能够满足复杂环境中的任务需求。文中设计了一种四旋翼直升机飞行控制系统软硬件方案,通过传感器实时采集四旋翼的姿态、高度、位置等信息,采用PID算法设计飞行控制律,以ARM Cortex—M3内核高性能单片机作为主控制器。最后采用CVI开发的地面站软件实现在线数据采集与调参,并通过实际飞行验证了本方案的可行性与稳定性。
关键词:四旋翼直升机;飞行控制;单片机;惯性导航系统
四旋翼飞行器(Ouadrotor,Four-rotor,4 rotors helicopter,X4-flver等)是一种特殊构型的电动可遥控微型飞行器,它是由4个螺旋桨驱动,通过4个螺旋桨的差速来完成姿态控制。四旋翼飞行器与其他类型的无人机相比具有许多优点,其中主要是其可垂直起降及机动性强等性能,能够适应各种复杂环境。因此四旋翼飞行器在民用产品、军事武器等各方面有着广泛的应用前景。文中将介绍四旋翼飞行器控制系统的软硬件设计方案与实现。
1 飞行控制系统总体设计
四旋翼飞行器控制系统的设计主要包括主飞行控制板和相关外围电路,结合惯性传感器、超声波传感器、GPS接收机、无线数传模块,并配套自行开发的地面站软件设计实现一套完整的四旋翼飞行器自主飞行控制系统。
四旋翼飞行器飞行控制系统的开发内容主要包括:飞控板及外围电路设计,传感器底层驱动开发,PWM控制信号的混控输出,飞行控制律程序设计以及地面站软件的设计与开发。
飞控系统的总体设计方案如图1所示。系统核心控制器为一款基于ARM cortex—M3内核的单片机;惯性测量元件(IMU)主要提供解算飞行器姿态的数据等信息;高度传感器采用超声波传感器,输出相对地面的高度信息;接收机接收遥控器发出的杆量信号,这些信号将用于控制器的输入;GPS接收机输出飞行器的位置信息;无线数据传输模块用于飞行器与地面站的数据通信。传感器信息经过飞行控制律的运算处理,最终通过PWM信号输出至电子调速器,用来控制四个电机的转速,以实现姿态、位置与高度的控制。地面通过无线数传实时传回飞行器信息用以检测飞行器飞行状态,同时地面站也可以向飞行器发送控制指令。
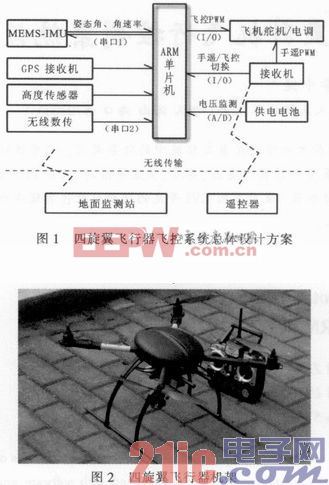
四旋翼飞行器的机架选用了市面上做工比较好的Xaircraft-650,其优点是各个组件采用模块化设计,方便拆卸和损耗更换,同时较高的起落架设计方便在飞行器底部搭载相关传感器设备。四旋翼飞行器的机架如图2所示。
2 飞控系统硬件设计
2.1 飞控核心板设计
飞控板的主控芯片选用意法半导体公司的ARM Cortex—M3内核的单片机STM32。其功耗低,最高工作频率72 MHz,拥有512K字节的闪存程序存储器和高达64K字节的SRAM,最多可达112个快速I/O端口,多达4个16位定时器,5个USRAT、3个SPI、2个I2C、1个CAN、1个USB2.0全速接口。具有优异的实时性能,同时拥有丰富而规范的固件库,适合飞控板的开发。
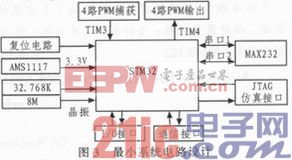
飞控板采用最小系统加全部接口引出的设计,即保证系统能够正常工作的前提下,引出所有扩展接口以方便后续实验开发的功能扩展。主控芯片STM32F103的最小系统原理电路设计框图如图3所示,由于主芯片需要3.3 V电压供电,所以采用稳压芯片产生3.3 V电压,还需加电容对稳压后的电压进行滤波。在保证正确供电和正确接地的同时,需外加两个晶振电路。其中8M晶振作为系统外部时钟,起振后为系统提供时钟信号:32.768K晶振主要用于系统的实时时钟RTC电路;引出所有引脚以供扩展之用,同时设计了外部复位电路。

万能遥控器相关文章:万能遥控器代码
pid控制相关文章:pid控制原理
pid控制器相关文章:pid控制器原理
调速器相关文章:调速器原理









评论