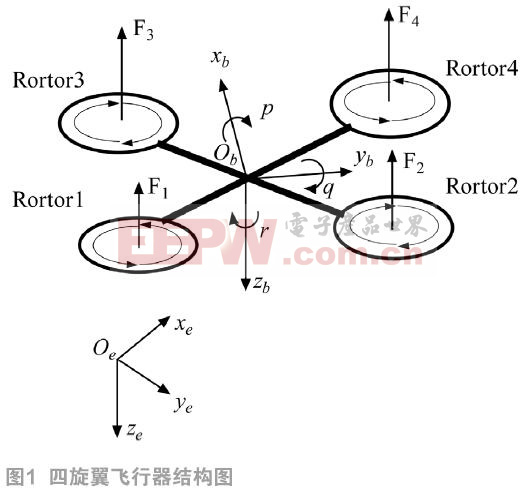
- 针对在参数变化、外部干扰条件下四旋翼飞行器的稳定飞行控制问题,本文提出了一种基于反步法的四旋翼飞行器增稳控制方法。首先,建立四旋翼飞行器的动态模型。其次,基于反步法设计的控制器用于飞行器姿态控制,采用模糊自适应PID控制器对飞行器的高度和位置进行控制,将两者结合构成一个内环姿态和外环位置结构的双闭环控制器,从而实现四旋翼飞行器的混合增稳控制。仿真和实际测试结果表明所设计的控制器能够实现参数变化和外部干扰时的稳定控制。
- 关键字:
反步法 模糊自适应PID 飞行控制 四旋翼飞行器 稳定性 201809
- 四旋翼直升机具有4个呈交叉结构排列的螺旋桨,其独特的构型能够满足复杂环境中的任务需求。文中设计了一种四旋翼直升机飞行控制系统软硬件方案,通过传感器实时采集四旋翼的姿态、高度、位置等信息,采用PID算法设计飞行控制律,以ARM Cortex—M3内核高性能单片机作为主控制器。最后采用CVI开发的地面站软件实现在线数据采集与调参,并通过实际飞行验证了本方案的可行性与稳定性。
- 关键字:
ARM 内核 单片机 飞行控制
- Korry Electronics利用虚拟仪器的强大功能设计出波音787 Dreamliner飞机上使用的控制面板我们使用LabVIEW可以快速地开发新的测试软件,而且可以对CAN总线数据进行无限制的控制。PXI-CAN卡非常容易配置,而且有着高度
- 关键字:
CAN 787 设备 飞行控制
- 介绍了一种用于简易制导炸弹的飞行控制计算机设计原理;阐述了在静态环境下仿真飞行控制计算机的工作流程和调试飞行控制计算机外围接口的方法。
- 关键字:
控制系统 接口 武器,飞行控制
飞行控制介绍
您好,目前还没有人创建词条飞行控制!
欢迎您创建该词条,阐述对飞行控制的理解,并与今后在此搜索飞行控制的朋友们分享。
创建词条
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司

京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473