基于DSP实现的步进电机控制器的设计

引 言
本文引用地址:https://www.eepw.com.cn/article/173733.htmDSP(Digital Signal Processor)是一种特别适合于进行数字信号处理运算的微处理器,其采用先进的软、硬件结构,其内部的程序空间和数据空间分开,可以同时访问指令和数据,并且具有事件模块管理功能及快速的中断处理功能,其以高性能及日趋低价位的特点,越来越广泛地应用于信息处理、控制系统中。TMS320LF2407芯片作为一款定点DSP控制器尤为适合于控制系统,其所包含的事件管理模块,可以极为方便的实现电机数字化控制。步进电机是数字控制系统的一种常见的执行元件,其接收数字控制信号(电脉冲信号),并转换成与之相对应的角位移或直线位移。步进电机具有开环控制无累计误差的优点,控制系统结构简单,因而得到了广泛的应用。本文所介绍的是一种基于TMS320LF2407实现的步进电机控制系统的设计。
1 系统硬件构成
整个系统分为五个部分组成:DSP中央控制器TMS320LF2407,步进电机及驱动,光电编码器,键盘及液晶显示部分,以及整个系统的外围电源电路及看门狗复位电路组成,如图1所示。在这个系统设计中,由键盘设定给定转速(位置),通过中央控制器TMS320LF2407来产生PWM脉冲信号来控制步进电机的转速(位置),可以采用光电编码器对步进电机的转速(位置)进行采样检测实现闭环控制,也可以采用开环控制无需转速(位置)信号,以上过程中的多个变量、参数可以在液晶显示屏上得到直观地反映。整个硬件结构简单直观,中央控制器TMS320LF2407还剩余丰富的I/O及中断资源,在此设计基础上具有一定的扩展空间。
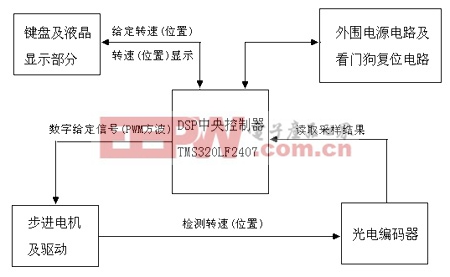
图1 硬件原理方框图
本设计采用的是55BF03型三相反应式步进电机,其接收数字控制信号(电脉冲信号),并转换成与之相对应的角位移或直线位移。此设计是用中央控制器TMS320LF2407产生的PWM环形脉冲信号经过信号分配以及功率放大传送给步进电机实现对步进电机的角位置或直线位移控制,所以此步进电机的驱动结构设计由以下几部分组成,脉冲信号,信号分配,功率放大,步进电机及负载,如下图2所示。在这个设计中基于对力矩、平稳、噪音及减少角度等方面的考虑,在这里设计成产生一个三相六拍信号来进行步进电机的控制,通电顺序为A-AB-B-BC-C-CA,步距角为1.5°,功率放大采用的是典型的单压驱动方式。

图2 步进电机驱动方框图
光电编码器的选择,可以选择增量式编码器或绝对值编码器,前者适用于速度检测,后者适用于位置检测。编码器的A、B信号与正交解码脉冲单元QEP相对应的引脚连接,可以检测出步进电机的速度(位置),并且能够判断出步进电机的旋转方向。
在显示方面,由于液晶显示器(LCD)点阵式或图形式不仅可以显示字符、数字,还可以显示各种图形、曲线和汉字,并且可以实现屏幕上下左右滚动、动画、闪烁、文本显示等功能,功耗小、体积小、质量轻、超薄等诸多其它显示器无法比拟的优点,用途十分广泛。本系统设计中用到的是HY-12864图形液晶显示器,它内置两块HD61202液晶显示控制驱动器,此屏幕的最大显示范围为128*64。HY-12864引出的以下控制信号:读写信号(R/W)、数据或指令信号(RS)、左、右屏片选信号(CS1、CS2)、使能信号(E)及数据总线(DB0――DB7),由TMS320LF2407的I/O口直接控制,连接原理图如下图3所示。











评论