基于雷达组网远程监控系统设计与实现

摘要:针对雷达组网系统对远端雷达站监控的需要,提出了一种雷达远程监控系统设计方法。采用高性能TMS320DM642处理器作为系统硬件平台,应用其高速处理性能和片上集成外设端口功能,实现对雷达状态视频信号采集及数据压缩处哩,利用其IP端口完成远程数据传输。该系统嵌入远端雷达站,以视频方式收集雷达工作状态信息并上传;雷达组网系统接收并显示各雷达视频信息,实现了远程监控。
关键词:雷达;TMS320DM642;远程监控;IP通信
雷达组网是将不同频段、不同体制、不同功能的多部雷达进行优化布站综合使用,充分发挥各单站雷达功能,达到监测空间扩展和情报信息融合与共享等目的。近年来雷达组网技术在气象预报、航空航天、国防等领域得到了广泛的应用,随着组网系统内的雷达站数量不断增加,设备的分布区域随之迅速拓展,各雷达站提供的数据和信息,越来越难以满足发展的需要了。雷达组网系统管理需要了解更详细的雷达工作状态信息,另外在多源信息融合处理等方面,各雷达工作的细节情况越来越被重视。本设计旨在组网系统的各类雷达内部嵌入远程监控系统,通过视频方式收集雷达工作状态信息,将包含雷达信息的视频信号转换成数字信号,压缩处理后通过IP网络上传;雷达组网系统监控中心复原并显示各雷达现场视频信息,随时掌握所有雷达的当前运行情况,对远端雷达实行有效的管理。
1 系统方案设计
雷达组网系统监控中心既要了解远端雷达工作状态,也要掌握雷达设备外部周边情况。每部雷达状态信息在其系统控制台和伺服控制台都有集中显示,因此可直接从控制台获取雷达状态视频信息,而雷达外部周边情况只有通过摄像方式获取。采用视频方法收集雷达现场工作信息,在信息采集过程不会对设备产生任何影响,获取内容丰富且方法简捷高效;同时也便于监控中心信息复原处理,可达到状态信息显示的一致。尽管各部雷达在体制及用途等方面有所不相同,但监控中心对其监管基本相同,因此设计是以不影响现有雷达功能为前提,满足任何种类的雷达安装使用。系统首先将雷达内部信息和外部情况转换为标准模拟视频信号,然后把包含雷达状态信息的模拟视频信号转化成数字视频信号,最后将数字视频信号压缩处理并通过网络上传到监控中心。
1.1 DSP平台的选择
由于系统采集的视频数据量较大,同时需要对其进行实时处理,且还要完成数据网络传输,因此选择能够满足系统要求的、速度快、功能强大的数字信号处理器是十分重要的。TMS320DM642是TI推出的一款面向数字多媒体应用的32位定点高性能DSP,有3种时钟频率可选,最高处理速度达720 MIPS;它是在TI的C64xDSP内核的基础上,集成了完备的视频/音频的输入/输出接口、以太网接口、PCI-66总线等片上外设。该处理核为VelociTI.2结构,采用高级的超长指令字(VLIW)结构和多级流水线机制,8个独立高速处理单元,使得在一个指令周期能够并行处理8条32位的指令。应用该DSP处理器不仅会极大地提高视频图像处理的速度,而且使算法的选择更为灵活和多样化。
TMS320DM642处理器有利于系统构成五个主要特点:超长指令字VelociTI.2体系结构、增强的并行处理机制及二级缓存结构,保障数据处理运行高效率;3个可编程视频端口,可与视频编解码芯片无缝连接,简化接口设计且增强了系统的可靠性;外部存储器接口64位EMIF可与SDRAM,SB-SRAM和SRAM等同步/异步存储器的直接连接,便于存储空间的扩展和大量数据的存取;集成10 Mb/s/100 Mb/s自适应模式以太网接口,可为系统构建一条100 Mb/s的高速以太网接口;提供了多通道DMA/EDMA控制器和通用GPIO输入/输出端口等,便于系统管理与控制。
1.2 系统组成
远程视频监控系统由DSP处理器、摄像机、信号转换器、视频解码器、CPLD控制器、图像存储器SDRAM、程序存储器FLASH、网络传输接口等部分组成,系统结构如图1所示。
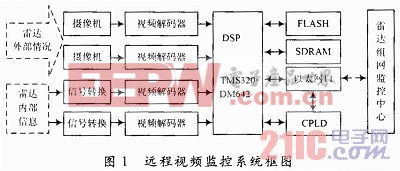
每部雷达至少需要向监控中心提供4路视频信息,才能较全面反映雷达现场工作情况。系统利用视频采集的方式收集雷达工作状态信息,视频信息主要包括雷达系统内部信息和工作环境外部情况。设备内部信息由2路信号转换器从雷达系统监控台和伺服控制台的显示设备上录取;设备外部情况由安装在雷达站的2路摄像机直接摄取,主要是人员操作与设备周边等情况。由于DSP不能直接处理模拟视频信号,必须将采集的模拟视频信号转换成为符合ITU-R BT.656标准的数字信号,4片TVP5150高性能视频解码器承担模拟视频信号的数字转换处理工作。
TMS320DM642主频配置为600 MHz,处理能力为4 800 MIPS,满足系统数据处理需要。为了满足数据处理要求,通过EMIFA在CE0空间外扩2片SDRAM存储器,系统的存储空间扩展为32 MB。同时通过EMIFA在CE1空间外扩展了一片4MB FLASH作为程序存储器,当系统上电或复位启动时,自动从程序存储器上加载程序代码。应用片内部的以太网控制器外设使用外扩物理层器件,构建一条100Mb/s的高速以太网接口。采用CPLD搭建系统控制电路,避免了复杂的硬件设计,集中管理系统内的控制信号,主要包括总线控制、地址译码、同步控制信号、使能及中断信号等。
1.3 主要工作流程
系统上电后,首先初始化DSP处理器,然后初始化PLL、GPIO、相关中断寄存器、设置视频端口及视频解码器,等待中断信号。4路现场采集的PAL制式视频信号,经过对应的视频解码器TVP5150处理,转换成8 b的ITUBT.656格式的数字视频信号,相应的行、场同步等同步信息打包成内嵌同步头信号,一起送入DSP对应的视频VP接口。各路模拟视频信号经过解码器转换成数字信号后,传送到DSP的数字视频接口VP,通知DSP读取的一帧内的图像数据,存放到一个临时的缓冲空间里,一帧图像缓冲空间满后触发中断;DSP接收到中断后,将缓冲空间里的数据放到图像缓存SDRAM中。DSP依次对图像缓存SDRAM中的每路的整帧视频信号进行压缩编码等处理,将处理后的数据写入输出缓存SDRAM中。当写外部接口条件满足,DSP将处理后的数据从输出缓存SDRAM中读出,经以太网输出向雷达组网系统监控中心发送。雷达组网系统监控中心通过IP地址访问各雷达站,接收雷达视频数据信息,经过解码回放以多屏切换显示方式监视远端雷达的工作情况。






评论