汽车安全技术:日产转向以摄像头为轴心进行开发

“此前我们一直以毫米波雷达和超声波传感器(声纳)为轴心思考开发的,而目前安全技术正逐渐转向以摄像头为轴心进行开发”。日产汽车统管技术开发的丰增俊一(日产执行董事、电子技术开发本部EV技术开发本部主管),在2011年10月上旬举行的“先进技术说明会&试驾会2011”上如是说。
日产以前一直致力于开发以毫米波雷达和超声波传感器为基础来提高汽车安全的技术。不过,目前开发方向已经发生了变化,由于最近摄像头识别技术的发展,安全技术的核心转向了摄像头。据介绍,毫米波雷达和超声波传感器将主要起辅助作用。
追加移动物体检测功能
日产汽车利用摄像头的代表性安全技术,包括显示车辆周围俯瞰影像的“环视显示器”。所谓环视显示器,是将车辆前后左右各一个共四个摄像头的影像合成为一个影像显示。日产汽车在2007年10月上市的“君爵”(Elgrand)中配备了该系统。
此次,日产汽车为环视显示器追加了检测移动物体的功能。该公司还开发出了在摄像头的影像数据基础之上识别周围“运动物体”的算法,并配备在了电子控制单元(ECU)上。将首先用于2011年11月进行局部改进的君爵。
一个摄像头实现三项功能
作为利用摄像头的新一代技术,日产汽车公开了车辆前后各安装一个摄像头便可实现多项功能的演示(图1)。日产汽车表示,“我们将最大限度地利用已经配备的硬件,沿着抑制成本同时提高附加值的方向大力推进技术开发”。

图1:通过前方和后方各一个摄像头实现多种功能
日产汽车开发出了仅通过前方摄像头和后方摄像头来提高安全性的技术。除了识别车辆前方的汽车和行人外,还可以实现道路标志线的识别,车辆后方移动体检测等多项功能。
汽车前部安装的一个前方摄像头可实现三项功能,分别是当前方车辆靠近时通知驾驶员的功能;检测道路标志线与汽车位置之间的距离,一旦出现偏离车道的迹象就发出警告提示音的功能;在低速行驶状态当前方有行人时提醒驾驶员注意的功能。车辆和行人通过移动物体的形状和速度等进行分辨。
试制车在室内镜前方设置了前方摄像头。摄像头模块与进行图像识别处理的ECU融为一体。摄像头的摄像元件采用像素为640×480(VGA)的CMOS传感器。水平视角仅为40度左右,最大可以识别前方100m左右。
一个后方摄像头可实现三项功能,分别是道路标志线识别功能;在行驶过程中检测斜后方死角驶来的车辆和摩托车的功能;从停车场出来时识别车辆后方移动体(人和车辆等)的功能。摄像元件采用CMOS传感器,像素与前方摄像头相同。不过,水平视角提高到180度。因此摄像头的检测范围只有20~30m左右。
在一个摄像头可实现多种功能的情况下,估计今后将推进标配的是后方摄像头的三个功能。目前,北美地区正计划在2014~2015年前后强制设置可从驾驶席确认后方情况的后视摄像头。原因是很多北美用户会在停车场以车头朝前的方式停车,当倒车离开停车场时在车辆后方与行人发生碰撞事故的情况非常多。
日产汽车看准了今后将强制设置后视摄像头的趋势,计划“从2012年投放的新型车开始陆续采用”基于后方摄像头的三项功能(丰增)。
毫米波穿过车辆和道路间的缝隙
此外,有项新功能提高了采用传统毫米波雷达的安全技术价值,日产汽车还就此利用试制车进行了演示。这就是通过毫米波雷达识别因前方车辆遮挡而看不到的前方状况,从而避免碰撞的驾驶支援系统(图2)。
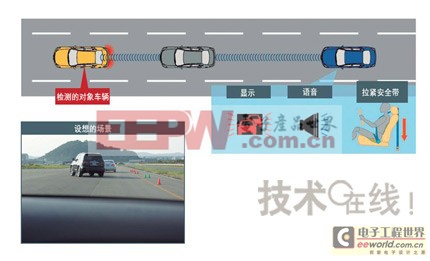
图2:利用毫米波掌握前方第二辆汽车的行驶情况
日产汽车公开了通过毫米波雷达识别因前方车辆遮挡而看不到的前方状况,从而避免碰撞的驾驶支援系统。目的是通过掌握前方第二辆车的行驶状况减少碰撞事故。
在高速公路上前方车辆车身较高时,若前方第二辆车的速度非常慢或紧急减速时,除存在与前方车辆一同追尾的危险外,因前方车辆突然变更车道,从而与前方第二辆车撞上的事故也经常发生。
此次开发的系统利用毫米波雷达监控与前方第二辆车的车距和相对速度,有碰撞危险时通过显示、声音以及拉紧安全带来提醒驾驶员注意。
毫米波雷达可以采用与原来相同的产品,因此无需变更硬件。前方第二辆车可以利用前方车辆底板与行驶道路间通过的毫米波检测。
其实,此前的系统已经可以通过毫米波掌握前方第二辆车的行驶状况。不过,当时是将重点放在了高精度测量与前方车辆间的相对速度上,因此“对来自前方第二辆车的反射波进行了除噪处理”(日产汽车)。









评论