TI:氮化镓赋能人形机器人高效电机关节

随着全身人形机器人的兴起,支撑其运动的电机控制器、功率电子器件和散热系统,必须提供比以往更强的动力、更高的精度和更高的效率。
为了实现与人类相近的活动范围,机器人全身通常需要部署约40 个伺服电机—— 一般是永磁同步电机(PMSM)或无刷直流电机(BLDC)。这些电机分布在身体不同部位,主要集中在颈部、躯干、手臂、腿部、脚趾及其他关节(手部除外)。为模拟人类的灵巧性,单只机械手可集成超过 10 个额外电机,用于控制独立手指与抓取机构。
这些电机的功率需求因具体功能而异。驱动手腕或手指精细动作的电机可能只需几安培电流,而嵌入髋部或膝盖的电机为支撑全身重量,电流需求可超过 100A。大多数情况下,这类机器人采用48V 配电架构,每块功率板为电机提供约500W~1kW功率。在这样的功率等级下,热管理成为首要挑战。
面对日益提升的功率密度要求,这些电机必须紧凑、轻量化且高效,才能装进人类尺寸的关节,同时实现人类级别的精准动作。通常由磁场定向控制(FOC)实现的高带宽、实时控制,对协调不同关节运动、保持平衡至关重要。同时,由每个关节内的紧凑型传感器提供的精准位置检测,是保证动作流畅、灵巧的关键。

德州仪器(TI)系统工程与市场总监王瑞恩(Ryan Wang)表示,氮化镓(GaN)正越来越多地被用于应对这些独特需求。得益于更低的开关损耗,GaN 功率场效应管可处理超过 100kHz的脉宽调制(PWM)频率,从而实现更精准的电机控制。
同样重要的是,GaN 能够在保持高效率的同时不产生过多热量,这让功率电子器件更容易装进空间紧凑的电机关节。
在上方视频中,德州仪器展示了其 GaN 功率级产品:每个器件都将半桥电路与栅极驱动器集成在单一封装内,与 MOSFET 方案相比,占位面积减少50% 以上。该演示展示了由一对基于 GaN 的功率板驱动的机械臂:一块用于驱动嵌入肘关节的电机,另一块控制手部的指关节。
这些功率板均基于 TI 的C2000 实时微控制器(MCU)。嵌入机器人肘关节的电机控制器控制三个半桥,为三相电机供电。TI 表示,这些 MCU 通过EtherCAT与系统其他部分通信 —— 这是一种基于以太网的实时工业级通信技术,广泛应用于工业自动化。
王瑞恩指出:“对机器人臂关节而言,最重要的是尽可能做得小巧、同时尽可能高效,同时不损失对速度、转矩和位置进行精确、动态控制的能力。”

图:传统伺服电机控制环路结构示意图
人形机器人关节内部的电机控制挑战
对于嵌入每个关节深处的电机,电机控制通常分为多个控制环路层级:转矩环、速度环、位置环,以及协调所有环路的运动控制环。上层控制环为下层提供参考输入。因此,每个控制环都依赖前后环节,且必须满足实时处理要求,才能保证机器人动作流畅、平衡。
转矩环(也称电流环)是系统的核心。电流环直接调节电机转矩,在大多数情况下,其工作频率与功率级中的 FET 开关频率相同,约为8kHz~32kHz,其他所有控制环均工作在更低频率。TI 表示,电流环的速度直接影响电机的精度和响应时间。
人形机器人哪怕迈出一步,都需要多达 40 个电机关节协同控制,才能实现精准运动与良好平衡。哪怕一个关节动作出现延迟,平衡都可能被打破。TI 称,要同步全身所有电机并保持机器人整体稳定性,每个关节的电机控制器都必须实现高精度、快响应。
这些需求可通过提高控制环速度与 PWM 频率来满足。100kHz 量级的开关频率可实现更高分辨率的电机电流,对应更小的电流纹波与更精准的控制。高分辨率电流波形也意味着更接近理想正弦波,从而提升效率、减少发热。
虽然 DC-DC 转换器需要更高带宽,但电机控制算法主要基于平均电流工作,因此带宽要求相对宽松。
此外,提高 PWM 频率可缩小系统中的直流母线电容。更高频率降低了母线电容需求,使传统功率级中大型圆柱形电解电容可被更小的陶瓷电容替代。
电机内的功率 FET 会通过 PWM 信号周期性地从母线电容抽取电流。提高 PWM 频率时,单次抽取的电荷量减少,从而降低所需母线电容值。
TI 解释称,即便将 PWM 频率从 20kHz 提升到 80kHz,也可用同等容值的陶瓷电容替代电解电容,实现相近的母线电压纹波。
然而,向更高开关频率、更快电流环过渡也会带来新挑战。对于基于 MOSFET 的功率驱动器,仅单纯提高 PWM 开关频率会带来巨大额外损耗,导致过热。例如,TI 数据显示,将开关频率从 10kHz 小幅提升至 20kHz,整体损耗会增加20%~30%,这种低效率对电池供电的人形机器人而言十分不利。

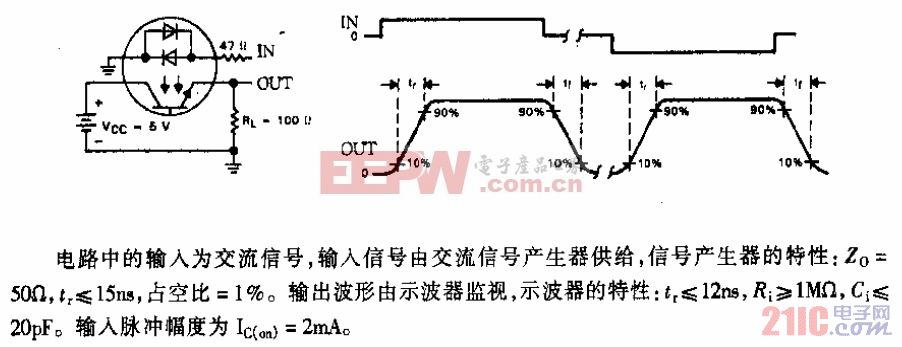
图 10K和100KHzPWM调制电流示意
氮化镓改写人形机器人功率规则
GaN 凭借其独特的功率处理特性成为潜在解决方案,可在高频下实现更低的开关损耗。TI 表示,GaN 功率器件具有更小的栅极电容(Cg)和输出电容(COSS),开关速度可比硅基 MOSFET 快高达 100 倍。
凭借更快的开通与关断时间,GaN 功率器件可将死区时间控制在 10~20ns范围,而硅基 MOSFET 通常需要约 1μs 的较长死区时间。死区时间减小可降低开关损耗。
此外,GaN FET没有体二极管。在高频开关场景中,MOSFET 的体二极管会造成巨大的反向恢复损耗。通过消除体二极管,GaN 功率器件降低了通常由其引发的开关节点振铃和电磁干扰(EMI)风险。TI 称,这有助于避免噪声干扰塞进人形机器人内部的其他电子系统。
人形关节内部空间也极为有限。功率板通常是直径仅5~10cm的环形 PCB,以适配肘关节;手指关节的尺寸则更小。除功率电子器件外,关节还必须集成电机本身,且在很多情况下需要多个传感器,包括用于检测电机转子位置的传感器。许多设计中还会集成力传感器,以判断机器人抓取或提起物体的重量。
至关重要的是,工程师必须在有限空间内实现更高功率与更稳定的电机控制。GaN 在这方面优势明显:其单位面积导通电阻(RDS (on))显著更低,与硅 MOSFET 相比可实现更小的芯片面积。TI 表示,通过将功率晶体管与栅极驱动器集成到小至 4.5×5.5mm的单一封装中,并集成保护功能,可进一步节省空间。
TI 称,将栅极驱动器与功率 FET 集成,可最小化栅极振铃,提升运行可靠性;这种集成还能减小功率环路电感,进一步降低 EMI 并提高效率。






评论