汽车变截面板簧轧机计算机控制系统的研究

2.3 多变量处理
在轧制过程中除了对拉拔、压下机构进行位置伺服控制外,还要保证液压系统的流量及液压马达的输出扭矩保持恒定。轧机的控制系统为一多变量控制系统。
液压系统采用的伺服阀内部具有阀芯位置的闭环控制环节,可看作一比例环节。为了简化控制器结构,根据设计要求,拉拔机构、液压系统的流量、液压马达的输出扭矩分别采用开环控制,系统近似为单变量系统。由于产品的截面变形曲线的斜率较小,即压下装置的运动速度远小于拉拔机构的运动速度。所以即使拉拔方向采取开环控制,也可获得期望的控制效果。
2.4控制算法
采用智能控制算法对电液伺服系统已有成功的报道[1] ,对轧机这类具有双坐标的电液伺服系统,也选择了多模态仿人智能控制算法。轧机的液压伺服系统具有大流量、高压力且拉拔方向运动的最高速度为30m/min,控制对象有一定的非线性、时变性。在设计有效的控制算法时,首先应考虑控制系统的实时性,这要求控制系统的结构不应该很复杂的,其决策和推理应是快速的。
多模态控制就是在控制过程中根据系统不同的特征状态,控制器采用不同的控制策略和控制模式的一种控制算法。特征状态是指一些反映系统特性、特征变化以及所处状态的特征量的集合,用Gi表示。所有的特征状态构成一个特征状态集,用G表示。则有
G=<G1, G2,…,Gm>
其中 Gi=(Gi1,Gi2,…,Gih) (i=1,2,…,m)
控制模式用Ai表示,所有的控制模式构成了多模态控制器的控制模式集,用A表示。
A=<A1,A2, …,Am>
其中 Ai=U=f(Gij) (i=1,2,…,m;j=1,2,…,h)
控制的实现就是由G到A推理过程的实现。可由产生式规则IF G THEN A来表达。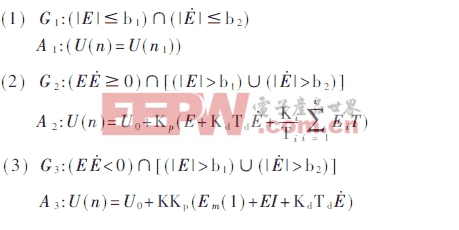
为了获得良好的实时性,同时也考虑控制精度的要求,应尽可能选择较少的特征状态。考虑控制系统的稳定性,选取误差及其一阶导数为基本特征量,经过这样的处理及大量的人-机在线学习的基础上,总结出下列三种基本的特征状态和相应的控制模式。
其中U(n)为控制量的第n次输出值;U0为控制量在误差过零时的保持值;b1,b2为常数;Kp和K分别为比例增益及抑制系数;Kd,Ki,Td,Ti分别为微分和积分抑制系数及时间常数;T为采样间隔;Em(1)为第一次误差峰值;EI为G2状态下的区间积分值。
文献[3]给出了控制对象的模型及仿人智能控制算法的仿真实验结果及与PID算法控制效果比较,从实验结果分析采用智能控制算法解决液压伺服系统的实时控制问题,能取得比PID控制算法更好的控制效果;控制器的设计不依赖对象的数学模型,对液压系统参数变化不敏感,鲁棒性强;算法简单,控制系统实时性好。
3 软件设计
控制软件在DOS操作系统下运行,采用C++语言模块化设计,分系统设置、自动轧制、手动操作、零点调试、工艺文件编辑修改、文件操作、显示、统计、打印等模块。中文图形界面,操作简便,只须输入轧制路径即可生成工艺文件。轧机状态及轧机运动曲线实时图形显示,通过修改系统中断8实现对采样、控制、显示的多任务处理。
总之,对电液伺服系统的控制采用多模态智能控制算法可以取得较好的控制效果,具有控制策略灵活、算法简单等优点,不仅伺服跟踪能力强,而且对系统参数变化不敏感,鲁棒性强,控制效果好。轧机已于1997年12月试制成功,投入正式生产。轧机的轧制速度、精度、运行可靠性等均达到设计要求。










评论