MAX7456在可视倒车雷达中的应用

2.3 视频叠加及系统控制电路
视频叠加及控制电路如图4所示,车尾摄像头拍摄的视频信号经视频输入端子P1、MAX7456的VIN端子输入,为防止输入信号对MAX7456内部电路的影响,必须在P1与VIN端口之间接O.1μF的输入耦合电容对输入信号进行直流隔离。输入的视频信号在MAX7456内部进行钳位,消噪声,字符点阵信号插入,电压衰减修正后由VOUT端子经P2输出,完成字符叠加工作。输出电路同样需要接输出耦合电容进行隔直,为不影响场同步信号通过,该电容通常应取330 μF以上,为降低耦合电容的成本和体积,MAX7456通过SAG端口连接电压衰减修正电容到VOUT输出端,用以在可接受的失真范围内尽量减小输出电容的容量,图4所示为其典型取值。本文引用地址:https://www.eepw.com.cn/article/197521.htm
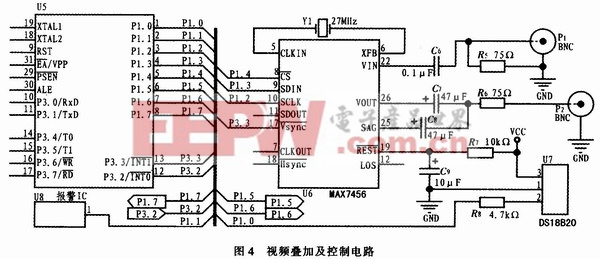
本设计中采用AT89C52对MAX7456进行控制,由于AT89C52没有SPI串行口,因此采用P1.2、P1.3、P1.4端口模拟SPI的时序对MAX7456进行控制。为防止在操作期间显示字符不稳定影响显示效果,此处采用MAX7456输出的场同步信号![]() 作为中断信号,控制AT89C52在视频信号的场消隐期间进行数据更新,以获得良好的显示效果。
作为中断信号,控制AT89C52在视频信号的场消隐期间进行数据更新,以获得良好的显示效果。
AT89C52的另一个任务就是控制测距电路进行超声波测距。由于测距电路共有4个探头,因此采用循环测距的方法进行工作,本测距雷达设计测量距离最大为5 m,根据超声波在空气中的传播速度式(3)可计算出倒车雷达在25℃时的声速为346.45 m,以此为基准进行计算,一次测距所需时间为28.8 ms,考虑到数据处理及显示控制时间,选择循环测距的切换时间为40 ms。测距时由AT89C52内部定时器进行控制,每隔40 ms由AT89C52的P1.5、P1.6控制HC4052切换一次探头,然后由P1.7发出12个频率为40 kHz、占空比为50%的脉冲信号通过发射电路到超声波探头,同时开启内部计时器进行时间测量。由于超声波探头在发射完探测信号后,还会有余振存在,在此期间检测不出有用信号。为防止此时的超声波余振信号通过接收电路回串引起AT89C52误中断,在该期间需关闭接收中断INT0。经实际测量,所使用的超声波探头在25℃时有1.7 ms的余振,因此关闭中断时间设置为2 ms,则由此产生的测量盲区在25℃时为0.35 m。由以上分析可得,在25℃时该超声雷达的测量范围在0.35~5 m之间。
3 软件设计
系统程序采用模块化设计,由主程序、后视系统控制、温度测量、距离测量、报警、温度及距离显示等模块组成,图5是主程序流程图。

系统在接通电源后,首先对MAX7456及DS18B20初始化,然后开摄像头及监视器,作为行车过程中的视频后视镜。在此期间MCU控制DS18 B20对车外温度进行测量,并将测量值送MAX7456与摄像头采集的车后视频图像进行叠加后送监视器。当MCU检测到倒车档时,轮流打开4个超声波探头对车后障碍物进行测量,并通过检测到的回波时间和车外温度,通过式(4)计算车尾到障碍物的距离,然后判断该值时否小于安全距离,若是,则打开报警器报警,同时将该距离值送MAX7456与视频叠加后送监视器显示。若检测到汽车档位不在倒车档位,则自动退出测距程序,恢复到后视镜状态。
4 试验结果
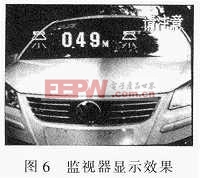
经实际装车测试,在25℃的环境中,对车后面积为1m2的粗糙平面障碍物,其测量范围为O.36~5.12m。在3m内,其测量误差在1.5%~3%,大于3 m时,随测量距离的增加,误差逐渐增大:在5m时误差为4.6%。测量距离值在监视器上的显示效果如图6所示,其视场清晰、提示字符醒目。
5 结束语
通过合理的硬件及软件设计,该装置实现了倒车雷达与视频后视镜的复合功能。与传统的倒车雷达相比,该系统将雷达测距信息叠加在视频后视镜的图像上,符合驾驶员的视觉习惯,减轻了驾驶员的工作强度,对防止传统倒车雷达对障碍物的漏报起到了良好的防范作用。该装置电路简单,功能丰富,价格低廉,具有很高的推广价值。

存储器相关文章:存储器原理
负离子发生器相关文章:负离子发生器原理 电容传感器相关文章:电容传感器原理 晶振相关文章:晶振原理 摄像头相关文章:摄像头原理 燃气报警器相关文章:燃气报警器原理



评论