汽车自动巡航系统PID控制策略的研究

5 系统软件流程
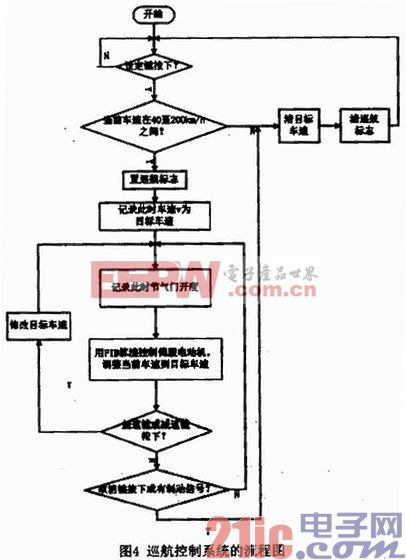
巡航控制过程如图4所示。在汽车电子巡航控制系统中,实际车速信号反馈至电子控制器,并与设定车速进行比较,因而系统工作在闭环控制方式,采用的控射方法是增量式PID控制策略。通过对单片机编程调节直流电机的转速和节气门的开度,使车速在允许的误差范围内保持稳定。本文引用地址:https://www.eepw.com.cn/article/196189.htm
为清晰阐述汽车自动巡航系统的软件设计,下面从模块化角度说明单片机软件编程部分的组成,单片机编程涉及的模块主要有初始化模块、键盘扫描模块、启动判断模块、通讯模块、中断模块、定时模块、看门狗模块等。
系统检测是否有按键按下,当巡航开关接通时,启动判断程序判断车速采集程序获得的车速信号是否在可巡航的范围内,此时设定键有效时,实际车速需维持在此时速度。定时程序块实现定时,达到定时点时间时发生中断,采集实际车速与设定值比较,若差值在误差允许范围内不动作,若不在,则进入电动机转速控制的程序段实现车速整定。当检测到加速或减速按键按下时,首先修改车速设定值,然后进入电机转速控制的程序段实现加速或减速;当检测到制动开关接通时退出巡航控制系统。
6 结论
本文将PID控制算法与Atmega 8单片机相结合,应用于汽车自动巡航控制系统的研究,有效地实现车辆在误差允许范围内的稳定行驶,可以减轻长时间驾驶旅途中驾驶员的劳动强度,进而减少交通事故的发生。也使得PID控制算法在汽车电子中有更为广泛的应用。











评论