基于FPGA的自适应锁相环设计

锁相环启动工作时,不论噪声水平高低,鉴相器输出信号的抖动都比较大,连续3次抖动高于上限值是比较正常的,这时若将带宽值减小,会降低跟踪速度。因此设计中限定,只有本振信号的相位和接收载波信号的相位大致相符后,才允许减小带宽值。因此环路设计中需要判断相位是否大致相符。
参看结构图l,经低通滤波后的同相和正交支路的信号分别为:。相位大致相符时,取值较小,I(t)2应大于Q(t)2。设计中利用条件判断是否已满足相位大致相符的条件。二者之差的下限值c同样与系统中的输入数据位数、滤波器等模块有关系,可在Modelsim或Quartus下通过测试获得。为了增加判断的准确性,设计中同样做出限定,连续3次满足条件时,才判定相位已大致相符。
5 实验结果及分析
设置中频载波信号为10 MHz,采样频率为80 MHz,本地初始中心频率为9.9 MHz。在信噪比固定为25 dB和信噪比变化的情况下,分别利用传统的锁相环和图2所示的自适应锁相环进行相位跟踪,得到的相差结果如图5所示。
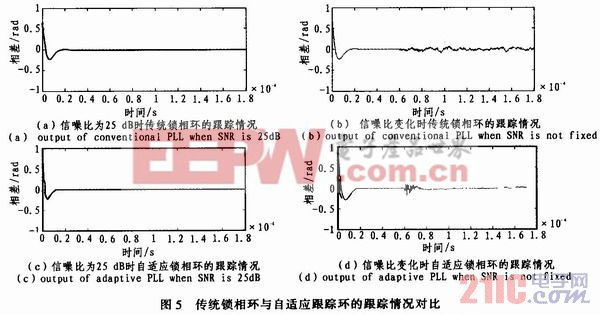
通过仿真结果(图5)可以看出,与传统锁相环相比,自适应锁相环能够根据当前环境自适应对环路带宽作出调整,对环境的适应性更强。噪声水平较低时,跟踪速度是关键性能参数。在噪声水平较低的情况下(对应25 dB),自适应跟踪具有更快的跟踪速度。噪声水平较高时,相位抖动是关键参数,结果显示,在噪声水平较高的情况下,自适应锁相环具有较小的抖动。
在此基础上,在多种信噪比环境下进行实验。信噪比较大即噪声水平较低时,传统锁相环的自适应跟踪的跟踪速度结果如表1所示。信噪比较小即噪声水平较高时,传统锁相环的自适应跟踪的跟踪速度结果如表2所示。
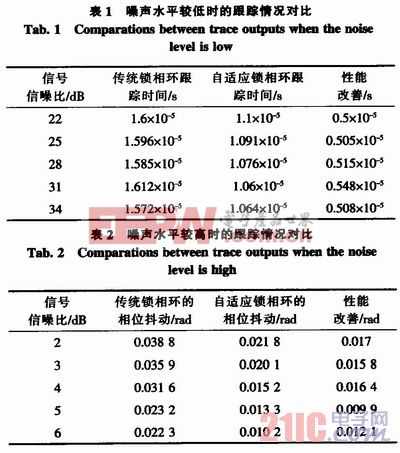
上述结果显示,与传统锁相环相比,自适应锁相环在噪声水平较高时,具有更快的跟踪速度,在噪声水平较低时,最有更小的相位抖动,起到了根据环境作出自适应调整的作用。
系统设计中使用的FPGA是EP3CIOF256C8。将调试好的程序下载到FPGA硬件板,通过QUARTUSⅡ软件中自带的SIGNALTAP工具对输入和输出信号进行实时观察,结果显示,设计的自适应锁相环能够进行正确稳定的跟踪,正确解调出数据信号。该模块目前已应用在基于数字中频方案的扩频接收机中。
6 结论
在传统锁相环的基础上,引入自适应参数调整模块,能够根据锁相环所处环境的噪声情况,自适应地对环路带宽进行调整,由于调整过程中步长取值较小,具有一定的连续性,因此,调整过程中仍能正常进行数据解调,不会引起突变,能够有效地在噪声性能和跟踪速度间进行平衡。
本文引用地址:https://www.eepw.com.cn/article/191454.htm









评论