基于MCU-FPGA的风光逆变并网系统设计

2 主回路电器选择以及参数计算
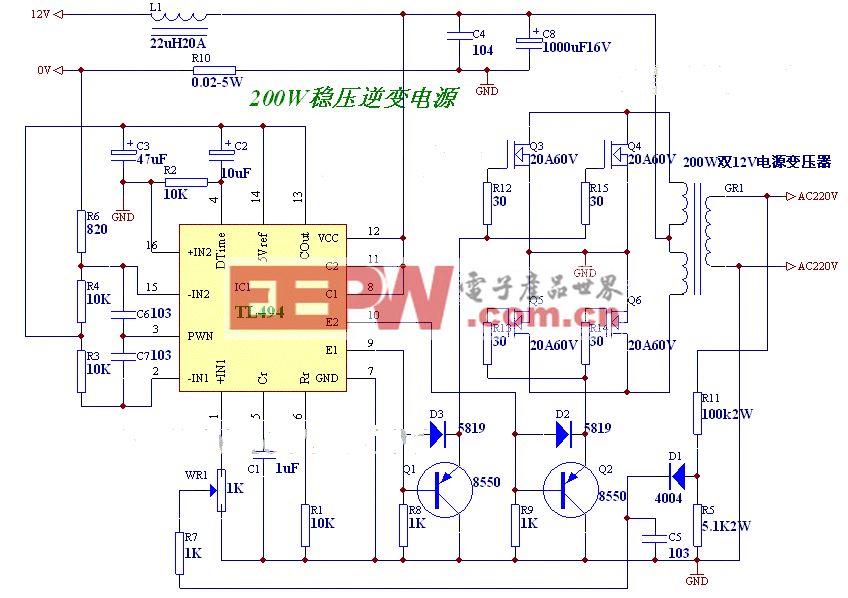
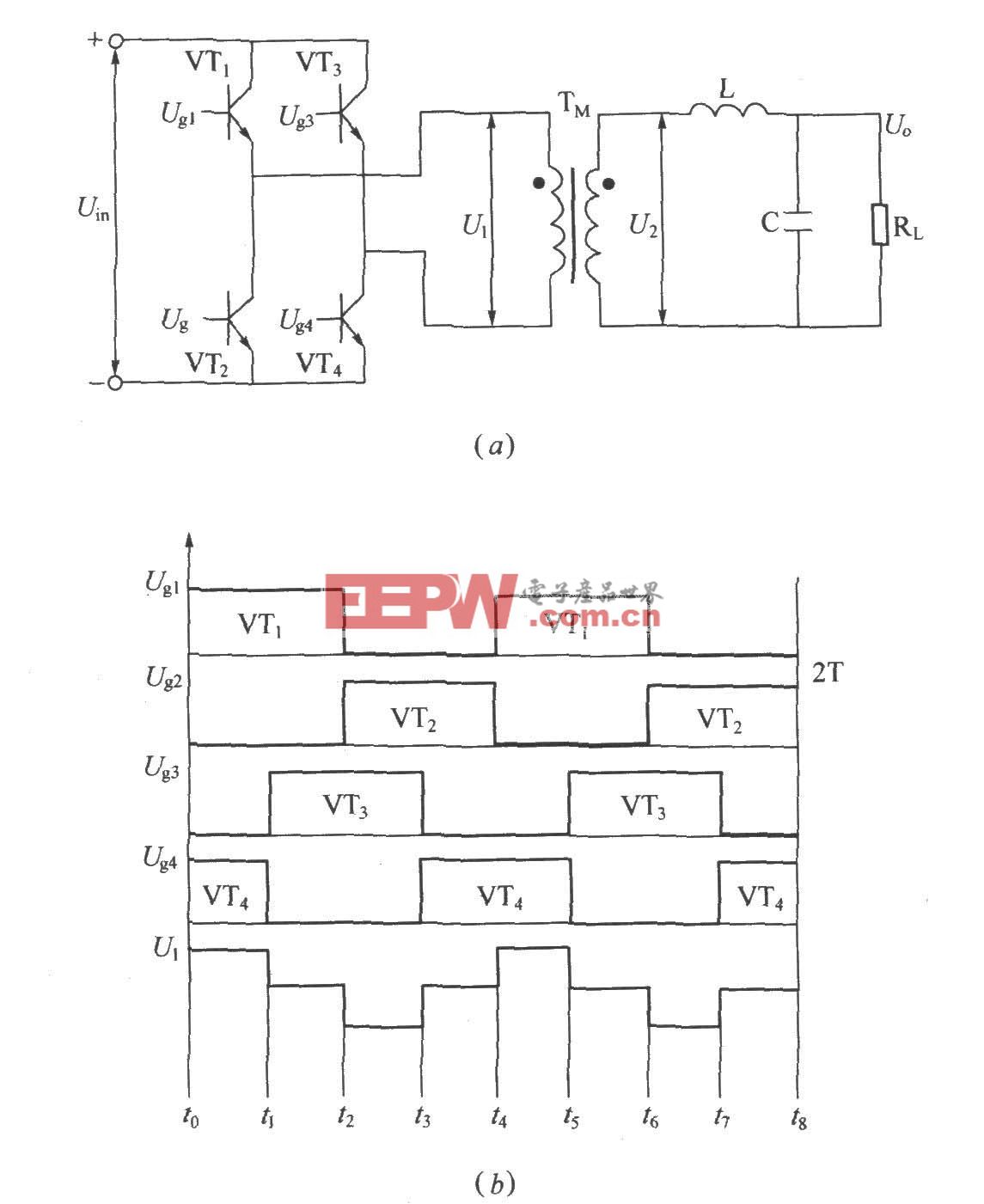
系统主回路由DC-AC变换器电路以及对输入/输出波形的整形和测量电路构成。为了减少损耗,同时又防止被反向击穿,主开关管选IRFB52N15(额定电流60A,耐压150V,导通电阻32MΩ)。采用SPWM控制的逆变电路,输出SPWM波中含有大量的高频谐波,加上防止上下桥臂直通而设置的死区,开关时间和功率器件参数差异等因素,输出电压只能够也含有一定的低次谐波,为了保证波形失真度尽可能低,必须采用输出滤波器。全桥采用LC滤波,其中的感抗XL=ωL=2πfL,容抗XC=1/(ωC)=1/(2πfC)。令ωL=1/(ωC),得到对应的截止频率
3 控制与算法设计
该系统的MCU选择的MSP430,MSP430系列是TI公司推出的超低功耗16单片机,性价比高,功能强,运行的速度快,其工作电流不到1mA,而且其具有多种低功耗模式。该方案选用了MSP430F2618作为主控芯片,监测输入电流、电压,过流、欠压时保护和故障排除后恢复;采样输出电压和电压跟踪最大功率;显示当前系统状态和输出的相关数据。
3.1 最大功率追踪算法
最大功率点跟踪算法根据判断原理和实现方法,大概可以归纳为六种:恒定电压及其改进算法、恒定电流及其改进算法、扰动观察法、增量电导法、模糊逻辑控制算法及神经网络控制算法。本文引用地址:https://www.eepw.com.cn/article/190140.htm
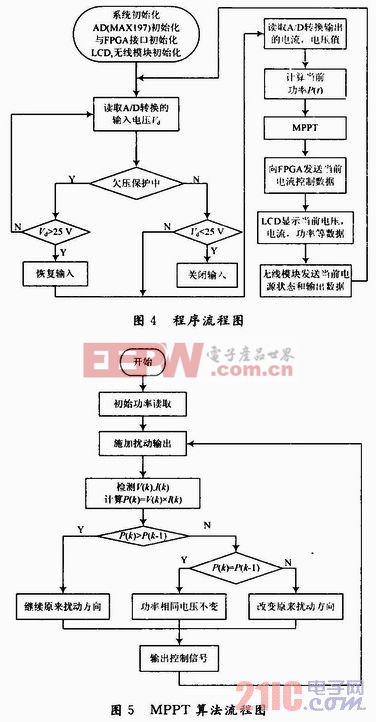
扰动观察法是一种较为简单实用且容易实现的方法,其思想是通过周期性的给电源的输出电压加扰动△V,测得电源的输出电流和电压,比较该采样时刻的输出功率P(t)与前一采样时刻输出功率P(t-1)的大小;如果P(t)>P(t-1),则在下一周期以同样方向加扰动,否则改变扰动的方向,这样逐步逼近最大功率点。但跟踪步长的设定无法兼顾跟踪精度和响应速度,在最大功率点附近振荡运行,会导致一定功率损失。
3.2 基于FPGA的相位追踪
该系统中产生的SPWM信号的正弦基波信号是FPGA内部的地址每次累加1位,然后查询FPGA内存储了正弦表的ROM,现将外部参考正弦信号和本系统自已产生的正弦波形通过比较器整形后的信号都输入FPGA,通过FPGA内部的异或门后得到的新信号,新信号为高表明两路信号依然存在相位差,这时FPGA内部的地址累加器递增2位,即让自己产生的正弦波的相位向前递增一个量化值,直至两路信号异或的结果完全为低为
止。由于FPGA的高速运算,整个相位的追踪在两个周期以内可以完成,能满足市场应用的要求。
4 结语
该系统以MCU-FPGA为构架,实现了风光逆变并网系统。系统充分利用了数字系统的计算精度,将逆变波形与外网市电的相位差控制在2°以内,并且通过最大功率追踪,让太阳能电池板或者风力发电机的发电效率达到最大。该系统成本低,体积小,且人性化设计,方便今后直接大批量投入市场使用。








评论