多路舵机控制PWM发生器的设计与Proteus仿真

3 系统设计
3.1 硬件电路设计
本系统电路可以基于单片机的最小系统设计,单片机最小系统通常包括电源、晶振和复位电路。系统要实现对舵机输出转角的控制,必须首先产生基本的PWM周期信号,即产生20 ms的周期信号,其次要调整脉宽,即调节单片机输出PWM信号的占空比。单片机能使PWM信号的脉冲宽度实现微秒级的变化,因而具有较高的控制精度,单片机可以通过控制算法将计算结果转化为PWM信号输出到舵机信号线上。但由于单片机系统是数字系统,其工作方式由程序决定,而控制信号的变化完全依靠硬件计数,所以受外界干扰小,系统可靠程度高。
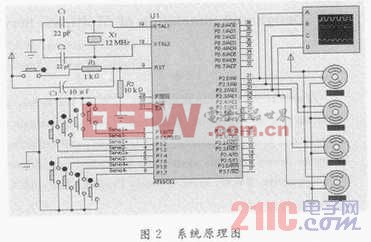
在用单片机驱动舵机之前,要先确定舵机的功率,然后选择足够功率的电源为舵机供电,而舵机信号控制端则只需要直接接在单片机I/O口上即可。一个多路舵机电路的设计图如图2所示。本文引用地址:https://www.eepw.com.cn/article/172636.htm
3.2 软件设计
本系统使用的是单片机的定时器方式2,方式2又被称为8位初值自动重装定时器/计数器,THX被作为常数缓冲器,当TLX计数溢出时,在溢出标志TFX置1的同时,还会自动将THX中的常数重新装入TLX中,使TLX从初值开始重新计数,这样就避免了人为软件重装初值所带来的时间误差,从而提高了定时器的计数精度,因此,方式2特别适合用做对精度要求较高的脉冲信号发生器的设计。因为其计数器只有8位,故最多能装载的计数个数为28=256个,在12 MHz的晶振频率下,单次最多可计时256μs。系统软件可以基于Keil编写,proteus可直接调用Keil编译生成的.HEX(16进制)文件进行仿真,当Keil程序修改重新编译后,Proteus不用做任何改动,直接运行便可看到修改后的程序运行效果。

pwm相关文章:pwm原理









评论