基于nRF24L01和Actel FPGA的智能探测系统设计

摘要:设计了基于nRF24L01无线数据传输芯片和Fusion StartKit开发板的智能探测系统。通过开启nRF24L01的ACK PAYLOAD功能实现车载系统与上位机之间的双向通信,采用Actel公司带有APB3总线的8051S软核在Fusion StartKit开发板上构建片上系统,使用MFC编写Windows环境下的人机交互界面,实现了具有实时数据传送、自动避障、远程操控等功能的智能探测系统。
本文引用地址:https://www.eepw.com.cn/article/162675.htm目前一些恶劣或危险的环境人类仍然无法置身其中进行现场检测,如出现险情的矿井地道、地形崎岖的岩洞等,很难取得现场的参数。在这种情况下只有借助于智能探测装置。因智能小车控制方便、行动灵活,对比其他载体工具更容易胜任探测任务,因此成为各种探测仪器的首选工具。
本文设计的智能探测系统以小车为载体,将所测得的现场参数通过nRF24L01无线模块实时传回上位机,具有快速灵活的特点;在实际工作时可左右转向和后退,自动躲避障碍物;同时该小车操控方便,可通过MFC搭建的人机交互界面利用鼠标和键盘对小车进行远程控制。
1、系统总体结构设计
该系统基于Actel FPGA实现,采用两块Fusi。nStartkit开发板,一块作为车载控制板,另一块作为中转板。车载控制板负责采集温度、湿度、板载电压、当前路况以及人体检测等现场信息,驱动小车运行,同时通过无线发送现场信息以及接收上位机的控制命令。中转板负责将接收到的无线信号通过串口转发给PC机,同时将PC机由串口返回的控制指令利用无线模块发送给车载控制板。PC机上采用MFC编写人机交互界面,显示小车所在环境的相关信息,同时提供鼠标、键盘等完善的操控手段。系统结构如图1所示。
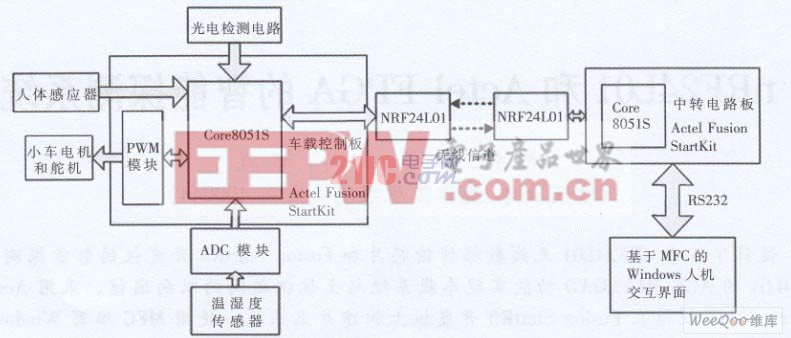
图1 系统结构框图











评论