基于ARM的气门电镦成型电流控制

Void TaskChufa(void *pdata)
{`设定定时器的定时时间`
Void timer_Int;
OSSemPend(Sem,0,err);
//等待外部中断EXINT0的中断信号量。
rTCON=0x19;//使能定时器0
OSSemPend(Ssz,0,err);
//等待定时器0的中断信号量。
`产生触发脉冲`
OSSemPost(Smg);
OSTASKDel(OS_PRIO_SELF);
}
时钟中断程序为:
Void zd_timer(void)
{
OS_ENTER_CRITICAL();//关中断
rINTCON=0x0;//禁止中断
OS_EXIT_CRITICAL();//开中断
OSSemPost(Ssz);
}本文引用地址:https://www.eepw.com.cn/article/152566.htm
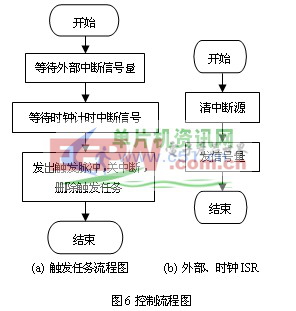
5.3 控制流程
#include
…………………
OS_STK TaskChufaStk[TaskStk]
Void TaskChufa(void *pdata)
OS_EVENT *Sem;
OS_EVENT *Ssz;
OS_EVENT *Smg;
Int main(void)
{
OSInit();
OSTaskCreate(TaskKey,(void*)0,
TaskKeyStk[TaskStk-1],3);
OSStart;
return(0);
}
6、结束语
在嵌入式电镦机中,利用可控硅移相触发方式可提高加热电流的控制精度;利用FUPID算法对加热电流控制进行优化处理,对气门成型的合格率及生产效率有极大的提高。

基尔霍夫电流相关文章:基尔霍夫电流定律








评论