基于ARM LPC2119的水情测报终端设计与实现

在CAN通信接口设计中,采用CTMl040T型高速CAN隔离收发器。隔离电路和RS485的隔离电路差不多。在主芯片LPC2119上加了8个拨码开关,可以选用其中的2个控制选择3个通信方式。
2.4 外围驱动模块设计
外围电路主要的作用是驱动电磁阀或者继电器来控制电机的运转,实现远程控制。具体的电路框图如图5所示。本文引用地址:https://www.eepw.com.cn/article/151360.htm
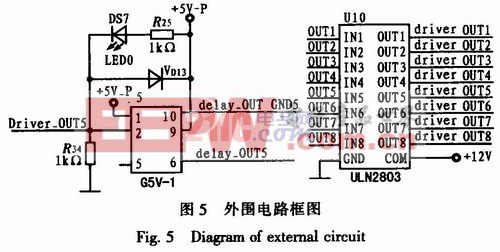
一般的I/O口输出的电压和电流都不能直接驱动电磁阀或者继电器,所以需要芯片驱动。选用ULN2803驱动8路外围器件,只是外围用的继电器和电磁阀都没有确定,所以留有接口(8路5 V,2路12 V,2路24 V的电源接口和ULN2803的驱动输出接口)。根据外面接入的设备灵活地选择接口接入。如果外面接的是电机,就直接用交流电供电。
2.5 MCU对外围接入设备的管理
MCU可以通过控制外面接入的设备所需电源进行控制,具体通过MCU的I/O口发送高低电平实现通断,以需要12 V的外围设备通断控制为例,其电路如图6所示。
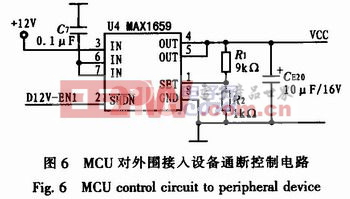
当外围器件要工作时,即MCU通过I/O口发送D12VENl为低的信号,此时MAXl659导通,得到12 V电源。这样做的目的有3个:1)将所用器件与外界电源隔开,减少外界干扰对器件的损坏;2)提供接入设备需要12 V用电;3)可以把不用的外围器件关掉。MAXl659是可控芯片,通过电阻R1、R2调节。其他的电源如5 V和24 V也可用同样方法进行控制。









评论