虹膜识别终端系统限制因素分析及解决方案

O 引言
本文引用地址:https://www.eepw.com.cn/article/151359.htm虹膜是位于人眼表面黑色瞳孔和白色巩膜之间的可见的环状组织,在一定频率的近红外光下,可呈现出丰富的纹理信息,如斑点条纹、细纹、冠状、隐窝等生理细节特征。人眼虹膜的可见生物组织结构依赖于婴儿胚胎期中胚层的初始条件,在人群中的分布可能是随机的或是混沌的,但一出生就终生稳定,而且每个人的虹膜纹理绝对地不同。统计表明,虹膜纹理有几百个自由度,即使是同样的基因型,其虹膜的表现型表达是不相关的。正因为人眼虹膜独特的纹理图像适合用于自动身份识别,所以其具有高效、准确、不可复制等特点。基本原理主要是通过对比虹膜纹理图像特征之间的相似性来确定人体的身份,其核心是经计算机进行大量的多种算法,使用模式识别、图像处理等方法对人眼的虹膜纹理特征进行描述和匹配(如早期应用Gabor小波对虹膜纹理编码,用汉民距离对虹膜模版进行匹配),从而实现自动的人体身份鉴别。
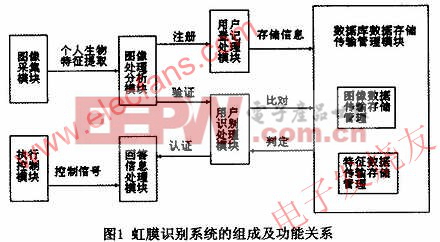
虹膜识别系统由软件系统和硬件系统组成,其中软件系统即虹膜信息处理系统,用以实现虹膜图像处理、用户登记、用户识别、虹膜图像存储管理、虹膜特征存储管理等功能。构成框图如图1所示。硬件系统包括虹膜图像采集系统以及支持虹膜信息处理系统运行的硬件环境。
目前市场上较成熟的计算机核心算法有英国剑桥大学的Daugman技术、英国巴斯大学的MJRLIN技术以及中国科学院的技术。本文实验系统采用英国巴斯大学的MIRLIN技术。
2 受限条件下的虹膜纹理图像采集技术分析
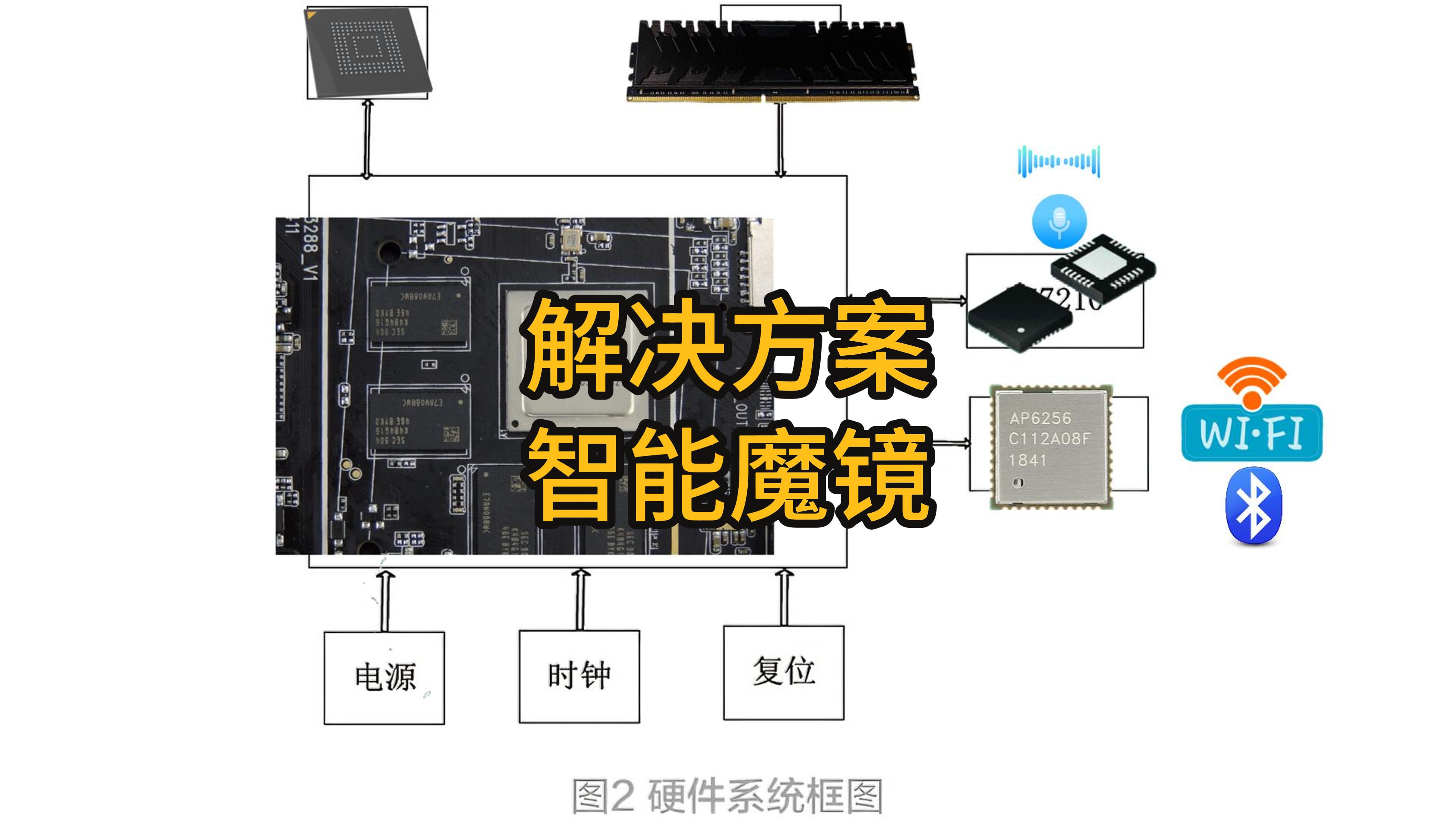
国际人眼安全标准协会要求虹膜图像采集装置为实时自动无侵害的虹膜光学成像装置。目前世界上主流的虹膜镜头采用640×480像素以上的CMOS逐行扫描摄像头,其中在人眼虹膜直径范围内要求至少有100个像素采集点以上,尽可能地保留原始虹膜图像的特征。根据ISO/IEC 19794-6图像标准,同时确保黑暗环境下拍摄的需要,光源选择波长为720~900nm的近红外光源,辐照功率0.5mW/cm2,对眼睛无伤害。摄像头的传输速率设为251帧/s,保证视频流的实时传输。拍摄过程中,中央处理模块对每帧图像作实时分析,直至该帧图像满足判别标准,同时该数据帧被传输到虹膜识别处理器核心模块做相应的判别处理。整体硬件设计架构如图2所示。

在共计352730次试验中我们发现,实际系统虹膜图像采集成功与否的几个重要限制因子包括人机的交互配合、光强度等系统外界限制。因此系统的适用性设计十分重要。为达到全自动智能化虹膜采集,通过数万次的实验,我们总结出系统设计有如下几方面的考虑:
2.1 距离感应
首先,摄像头模块须外置用户距离感应传感器用以监测个体的存在。传感器的选型可为接触式(如读卡器或密码开关模块等)和非接触式模块(如红外感应或双肩探头模块等),考虑到系统今后的兼容性,与CPU的接口设计建议使用GPIO连接。
2.2 人机交互
摄像头内置应用软件可以使用多国语言指导用户作相应的上机操作。根据内嵌的距离感应传感器模块将用户的距离反馈到中央处理器,然后以语音输出的形式指导用户调整头部位置直至进入合适的成像区域。或者使用视觉上的多色指示灯也可以满足这个效果。
2.3 可调成像深度
摄像头的成像深度是另外一个限制条件。为减少该限制因子的影响,提高系统的使用性能,摄像头应该有一定范围的成像深度。在这个范围内,光学镜头可以自动调节焦距实时成像。本试验系统的成像深度在22~36cm范围内均可正常成像。减小了系统对用户操作的限制。
2.4 头部倾斜检测
摄像头同时需要具有“头部倾斜检测”功能模块,来检测用户的头部是否倾斜超过一定范围导致无法正常进行后续的匹配判别。消除用户因头部位置不当导致认证失败的限制,确保系统的稳定性。






评论