基于ARM嵌入式图像处理平台的太阳跟踪系统

3 实验结果
3.1 基于计算机视觉方法的跟踪实验
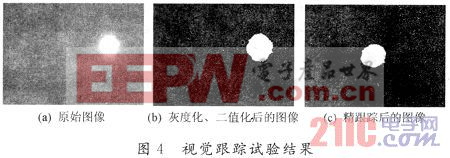
如图4所示是某次精跟踪过程的实验结果,其中(a)为CMOS图像传感器捕捉到的原始图像;(b)为经过灰度化、二值化后的结果,可以看出图像中的太阳已经被提取出来;(c)为精跟踪一段时间后图像传感器得到的图像,可以看出太阳处在图像中心位置,此时太阳光线垂直照射太阳能电池板。本文引用地址:https://www.eepw.com.cn/article/148942.htm
3.2 系统技术指标
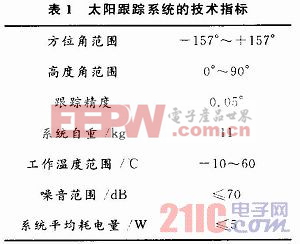
对本文提出的太阳跟踪系统进行了性能测试,通过分析测试结果,该系统的技术指标如表1所示。
4 结语
本文中设计的太阳跟踪系统采用视日运动跟踪方法和基于计算机视觉的跟踪方法相结合的方式,一方面采用视日运动跟踪方法进行初始粗定位和系统丢失目标时的重新粗定位;另一方面采用基于计算机视觉的跟踪方法进行精确跟踪。基于计算机视觉的跟踪方法采用CMOS图像传感器采集太阳光斑,利用ARM微控制器处理采集到的图像,实现对太阳的实时跟踪。实验结果表明,该系统可以连续跟踪太阳的角度变化,能够达到较高的跟踪精度;当跟踪目标丢失时,能够利用视日运动跟踪方法对系统重新定位,具有较好的环境适应能力。该系统具有较低的日均功耗、较高的跟踪精度和可靠性,结构简单轻便,可应用于各种太阳能光伏系统。








评论