Cyberdragon队智能车技术报告

电磁设计
本文引用地址:https://www.eepw.com.cn/article/117307.htm电磁导引智能车,主要包括电磁导引信号获取、起止线检测、控制算法三方面,此外,为使智能车拥有更好的性能还对车模进行了一些调整。
电磁导引信号获取
本设计中电磁信号获取包括了两部分:
1. 探头部分,本设计中使用工字型电感作为探头,利用它开放的磁芯作为感知交变磁场的媒介,为加强其抗噪性能,选取合适的电感与其串联组成谐振频率与信号频率一致的LC振荡回路。
2. 信号放大部分,本设计中使用两级级联的运放电路作为信号放大部分,两级放大电路均为带通放大,参数一致,都具有10倍的增益、20kHz的中心频率、4kHz的带宽以及2.5V的偏置电压。
起止线检测
考虑到起止线上会埋设表面磁场达上千高斯的磁钢,本设计中的起止线检测采用霍尔元件,为适应不同磁极,选型时选择的是全极型霍尔元件。 此外,为了方便控制算法的实现,与节省单片机资源,设计中使用开关霍尔,利用外部中断方式检测起止线。
控制算法
舵机控制采用P控制,为了加强信号可靠性,减小电机运作时反电动势及噪声的影响,对采样信号进行了软件滤波处理,通过去除最大最小值消除信号毛刺,通过取平均值的方法消减小波的影响。 本设计中使用PID算法作为速度控制算法,通过光电编码器实现速度反馈。
在通过实验确定各项系数后,又在普通PID算法的基础上做出了改良,引入了开环初始值:在实际速度与期望速度相差很大时不使用PID算法,而是直接通过事先标定的开环值对速度进行调整,然后再采用PID算法进行调节,最后达预期速度。
车模调整
为了加快车模转向响应,设计中对车模上舵机的传动连杆进行了加长,使响应速度提高了30%。由于连杆的加长,舵机安装方式也做出了相应改变,由卧式改为立式。 除此之外,还对车模进行了一些小的调校,包括主销内倾角、主销后倾、后轮差速机构等。
硬件系统方案设计
此智能车通过电磁传感器采集铺设在赛道上的导线中携带的20kHz交变电流的磁场,并以此为依据进行车体控制,利用适当的控制算法让智能车达到沿导线前进的目的。控制算法主要包括两方面:用于驱动智能车前进的电机控制和用于控制智能车转向的舵机控制。赛车结构示意简图如图1。
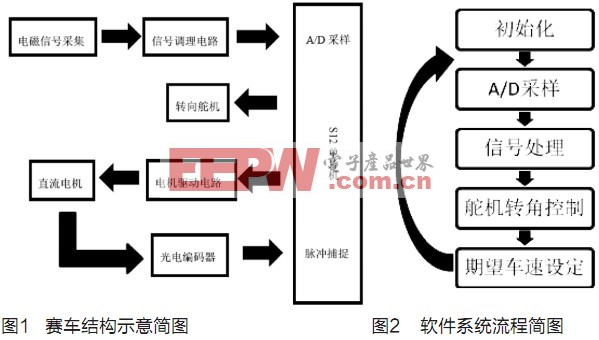
软件系统方案设计
有了硬件架构之后,必须要有一套合适的算法才能发挥出硬件的潜力。在一个控制周期中大致需要完成以下几个步骤:首先是信号采样,然后是一些有软件实现的信号处理,诸如滤波等。之后根据信号来对车辆进行控制,控制包括转向舵机和驱动电机两部分。舵机控制是根据信号直接确定的,对电机的控制则是只给出一个期望速度,由当前速度到期望速度的变化过程由更为底层的控制程序来完成。程序流程简图如图2 。
软件算法的编写必须根据硬件条件,再好的算法如果跟硬件不兼容的话也是徒劳的,调试的过程就是让其不断适应现有硬件的过程,智能车竞赛追求的不是最完美的程序而是最适合当前硬件的程序。
电容式触摸屏相关文章:电容式触摸屏原理













评论