Cyberdragon队智能车技术报告

使用两个Y方向探头识别十字道与弯道
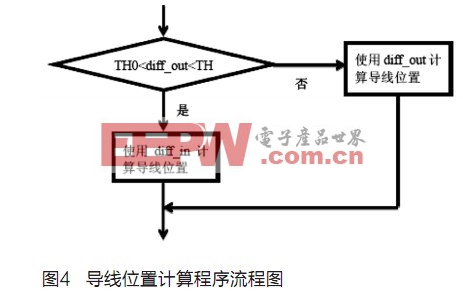
本文引用地址:https://www.eepw.com.cn/article/117307.htm使用4个X方向探头时,判断弯道的条件是当偏离导线的距离达到一定程度,而这种情况在以较差姿态进入十字道时也会碰到,因而会出现把十字道误判为弯道的情况。但是在Y方向上十字道与弯道的区别是很明显的,当赛车接近十字道时两个Y方向探头信号都会迅速增大,因为此时的磁场几乎是垂直于电感截面的,而接近弯道时由于赛道的最小转弯半径也有50cm,所以Y方向的磁场变化是比较缓慢且不对称的,即不会出现同时快速增大的情况。综上所述,只要把两个Y方向探头上的信号引入到弯道判断中就可以解决十字道与弯道的混淆。
速度闭环控制
赛车的速度控制用的是PID算法,为了加快速度响应,又在期望速度与实际速度相差较大时预先引入一个预先标定的开环函数,虽然开环函数会受到电池电压、电机传动摩擦力、道路摩擦力和前轮转向角度等等很多因素的影响,但如果只作为PID算法的初始值的话还是可以极大地加快逼近速度的。P、I和D的系数要根据赛道情况进行调节,调节思路是这样的:当赛车响应不够快时,需要增大P项的系数,但是P项系数的增大会带来超调量的增大;当超调量过大时,可以增大D项系数来减小超调量,但是会引入系统的稳态误差;I项可以消除稳态误差,但是会减慢赛车响应。具体调节时需要根据实际情况来进行参数调整。 速度闭环控制具体流程图如图5(图中期望速度与实际速度差用diff表示)。

参考文献 :
[1]卓晴,黄开胜,邵贝贝等. 学做智能车[M]. 北京:北京航空航天大学出版社, 2007.03
[2]田作华,陈学中,翁正新. 工程控制基础[M]. 北京:清华大学出版社,2007.09:197-203
[3]邵贝贝. 单片机嵌入式应用的在线开发方法[M]. 清华大学出版社,2007:158-159
[4]韩飞,陈放,戴春博. 上海交通大学CyberSmart队技术报告[R]
[5]梁昆,王韬,丁丁. 上海交通大学SmartStar队技术报告[R]
[6]李仕伯,马旭,卓晴[J]. 基于磁场检测的寻线小车传感器布局研究. 电子产品世界, 2009(12),41-44
电容式触摸屏相关文章:电容式触摸屏原理













评论