摄像头黑线识别算法和赛车行驶控制策略

引言
本文引用地址:https://www.eepw.com.cn/article/95519.htm按照第一届全国大学生“飞思卡尔”智能车大赛比赛规则要求:使用大赛组委会统一提供的竞赛车模,采用飞思卡尔16 位微控制器MC9S12DG128 作为核心控制单元,自主构思控制方案及系统设计,包括传感器信号采集处理、控制算法及执行、动力电机驱动、转向舵机控制等,以比赛完成时间短者为优胜者。其中赛道为在白色底板上铺设黑色引导线。根据赛道特点,主要有两种寻线设计方案:一、光电传感器方案;二、摄像头方案。
这两种方案各有特点:其中光电传感器构成“线型检测阵列”的方案简单易行,但是将其应用于智能车竞赛中仍有一些局限性。例如,由于受比赛规则限制(传感器数量不超过16 个(红外传感器的每对发射与接受单元计为1 个传感器,CCD 传感器记为1 个传感器)), 光电管的数量不可能太多,从而单个线型检测阵列所能确定的指引线信息较少。所以若是采用此方案,会导致寻线精度不够高,在接下来的舵机转向控制的时候产生直道蛇行或者弯道舵机回摆。此外,光电线型检测阵列的探测距离较短,而比赛又限制了整个车体系统的长度,这样,其对前方路况的预判断距离很有限。车辆行进速度较快时,若能预判前方一定距离的路况,则有助于智能车对前方突然出现的路况变化(如转弯)作及时的应对处理;否则,车辆可能会偏离指引线较远,甚或冲出赛道。
基于前述对“线型检测阵列”寻线能力局限性的考虑,我们选择采用摄像头作为寻线传感器。这是因为,一方面摄像头所能探测的赛道信息远多于“线型检测阵列”探测的,而且摄像头也有足够远的探测距离以方便对前方路况进行预判。另一方面,比赛规定使用的Freescale16 位单片机MC9S12DG128 的运算速度和自身AD 口的采样速度,能够适应对黑白低线数摄像头的有效视频采样和对大量图像数据的处理。
本文就是在摄像头方案的实时图像数据已经获得的基础上,对图像进行数据处理,提取赛道中的引导黑线位置,从而以此作为舵机和驱动电机的控制依据。
图像数据信息特点
摄像头的主要工作原理是:按一定的分辨率,以隔行扫描的方式采集图像上的点,当扫描到某点时,就通过图像传感芯片将该点处图像的灰度转换成与灰度成一一对应关系的电压值,然后将此电压值通过视频信号端输出。具体而言(参见图1),摄像头连续地扫描图像上的一行,则输出就是一段连续的电压视频信号,该电压信号的高低起伏正反映了该行图像的灰度变化情况。当扫描完一行,视频信号端就输出低于最低视频信号电压的电平(如0.3V),并保持一段时间。这样相当于,紧接着每行图像对应的电压信号之后会有一个电压“凹槽”,此“凹槽”叫做行同步脉冲,它是扫描换行的标志。然后,跳过一行后(因为摄像头是隔行扫描的方式),开始扫描新的一行,如此下去,直到扫描完该场的视频信号,接着就会出现一段场消隐区。此区中有若干个复合消隐脉冲(简称消隐脉冲),在这些消隐脉冲中,有个脉冲,它远宽于(即持续时间长于)其他的消隐脉冲,该消隐脉冲又称为场同步脉冲,它是扫描换场的标志。场同步脉冲标志着新的一场的到来,不过,场消隐区恰好跨在上一场的结尾部分和下一场的开始部分,得等场消隐区过去,下一场的视频信号才真正到来。摄像头每秒扫描25 幅图像,每幅又分奇、偶两场,先奇场后偶场,故每秒扫描50 场图像。奇场时只扫描图像中的奇数行,偶场时则只扫描偶数行。
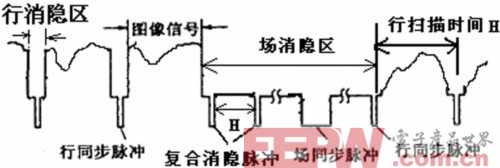
图1 摄像头视频信号












评论