汽车电子液压制动系统跟随特性的实验研究 ----EHB系统跟随特性的实验研究(一)

第4章EHB系统跟随特性的实验研究
本文引用地址:https://www.eepw.com.cn/article/274334.htm4.1引言
EHB系统由于取消了传统制动系统的制动踏板与制动卡钳间直接的液压链接,与传统液压制动系统在性能以及时间响应上存在巨大差异。因此EHB的成功研制需要大量的实车试验,才能得到系统的最佳性能时的工作状态。仅仅通过经验值的摸索方式调试会造成可信度的降低,并且导致在短时间内无法完成。而过长的开发周期会消耗大量的财力,人力和物力。因此在其设计开发过程中,台架试验是一个非常重要的手段,也是十分必要的。EHB试验台可以实现台架上制动负载的变化趋势与路面行驶一致。能够对传统制动系统的ABS、ESP、TCS等控制算法进行实验研究和验证,实际轮缸压力稳定快速对给定的目标压力进行跟随是更好实现这些功能的前提,良好的轮缸压力跟随可以为后续实车试验获得某些基本参数和算法打下坚实的基础,下面对EHB系统的跟随特性进行试验研究。
4.2 EHB制动压力跟随控制算法
4.2.1 PID控制原理
PID控制器一种是应用非常广泛的工业控制器。PID控制器是一种线性调节器,参数整定容易,其控制系统结构如图4.1所示,使用中通过设定调节三个参数(Kp,Ki和KD),即可调节系统的响应。PID的这三个参数Kp,KI和KD可以根据过程的动态特性及时整定,当使用中得不到精确的系统数学模型等条件,必须现场调试和依靠经验确定,这时最适合用PID控制技术。
PID控制器的微分方程如式4.1所示:

其传递函数为:

其中u(t)为系统输出,e(t)为系统目标值与实际输出值的偏差,Kp为比例系数,TI为积分时间常数。TD为微分时间常数。
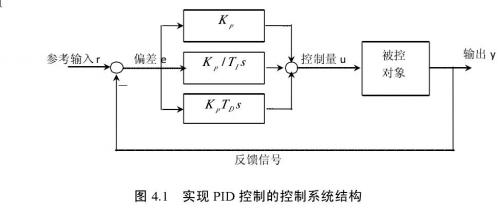
PID控制器是一种线性调节器,这种调节器是将系统的给定r与实际输出值y构成的控制偏差e =y- r的比例、积分、微分,通过线性组合构成控制量输入给控制对象。
PID控制器各校正环节的作用
比例环节:快速减小偏差,加快响应速度,但是过大会使系统超调量增大,影响系统稳定性。
积分环节:主要用于减小稳态误差,但会使系统响应速度减慢。
微分环节:在系统中偏差信号变得太大之前引入一个修正信号,从而加快系统的动作速度,减小了调节时间,减少了系统的超调量。
4.2.2 EHB液压系统制动压力的控制策略
PID控制器的控制量主要有目标信号和反馈信号两种信号:目标信号亦称目标值或给定值,即系统直接给定的轮缸压力值;反馈信号是指将压力控制信号输入到液压系统通过压力变换传感器测量到的系统输出的实际值,亦称反馈量或当前值。
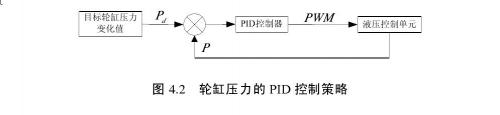
图4.2为轮缸压力的PID控制策略,欲使EHB系统中的某一个轮缸的制动力稳定在预期的目标值上,控制器中的PID必须将反馈信号与目标信号不断地进行比较,并根据比较结果来实时地调整输出的电磁阀的PWM值,以调整管路中的制动液的流量,最终使轮缸的压力值达到预期的目标值上。
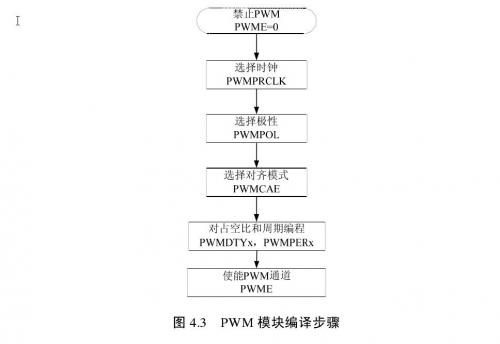
EHB系统的液压回路中采用PWM方式调节两位两通的进液阀和出液阀开启关闭的时间,控制液压缸中的进油和出油的平均流量,以实现对液压缸中的压力的控制。PWM控制信号由软件编程的方式产生,为了使高速开关阀有较好的线性调制范围和较快的响应速度,本文确定PWM调制信号的频率为25Hz.根据所确定的调制信号的周期。我们对MC9S12XE/S中的PWM模块进行编辑,具体步骤如图4.2
在EHB系统轮缸压力进行跟随控制时,以单端导通方式对高速开关阀进行控制。一个调制周期内当一个高速开关阀开启则另一个高速开关阀关闭。输入目标值与系统反馈值差值的正负决定了阀的开启与关闭,而差值的大小决定了调制信号的占空比。当目标值与反馈值之差为正时,系统需要进油增压,此时进液阀导通,出液阀关闭。当目标值与反馈值之差为负时,系统需要回油减压,此时进液阀关闭,出液阀导通。当差值很很小时,每个调制周期内的脉宽值都很小。当差值很大时,每个调制周期内的脉宽值都很小。
理想的开关阀,调制信号作用下,电磁阀做完全响应。在一个调制周期内,阀口流量方程为:

而在实际过程中,计算流量特性时应采用阀芯的平均位移Xv来表征方程中的阀芯最大位移xm,如下式:

Q:由出油口流出的液体流量( L /s ) P1:进油口压力( Pa )
P2:出油口压力( Pa ) ρ:液体密度(kg /m3 )
Cd:流量系数 w:阀口面积梯度(㎡)
从上式我们可以看出,通过改调制信号的占空比D可以控制通过阀的平均流量,最后实现对输出压力的控制。以进油阀为例,PWM信号的占空比按下式计算:
式中,D(t)为PWM信号的占空比,e(t)为轮缸的目标压力与实际压力之差,Pd(t)为轮缸的目标压力,P(t)为轮缸的实际压力,Kp、KI、KD分别为PID调节器中比例系数、积分系数及微分系数,E为压力偏差的门限值。
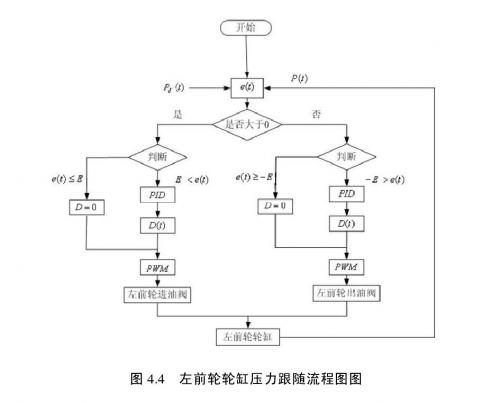
以左前轮制动轮缸为例,其压力跟随的流程图如图4.4所示。其中Pd(t)为左前轮轮缸目标压力,P(t)为左前轮轮缸的实际压力。当输入的目标压力值与反馈压力值之差大于门限值E,此时进液阀开启、出液阀关闭,从进液阀流入到液压缸的流量大于出液阀流出制动缸的流量,制动缸压力增大,当输入的目标压力值与反馈压力值之差在±E之间时,进液阀和出液阀均关闭,液压缸压力保持不变;当输入的目标压力值与反馈压力值之差小于-E时,此时进液阀关闭、出液阀开启,进液阀输入液压缸的流量小于出液阀流出制动缸的流量,系统减压。通过PWM模块输出的脉冲调制信号对高速开关阀各的控制,实现对制动压力的控制。

pid控制器相关文章:pid控制器原理


评论