汽车电子液压制动系统跟随特性的实验研究 ----汽车 EHB 系统的硬件设计(四)

3.3 EHB控制系统的设计
本文引用地址:https://www.eepw.com.cn/article/274333.htmEHB控制系统中硬件部分主要包括以下内容:控制单元ECU设计、输入通道设计、输出通道设计、电源系统设计和数采系统设计。
3.3.1控制系统整体结构设计
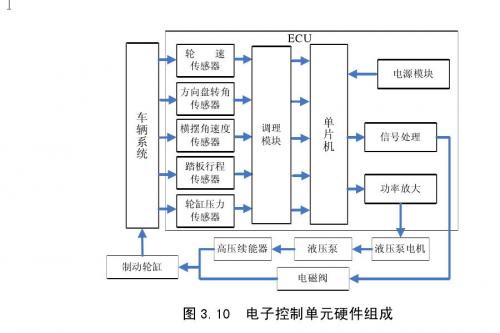
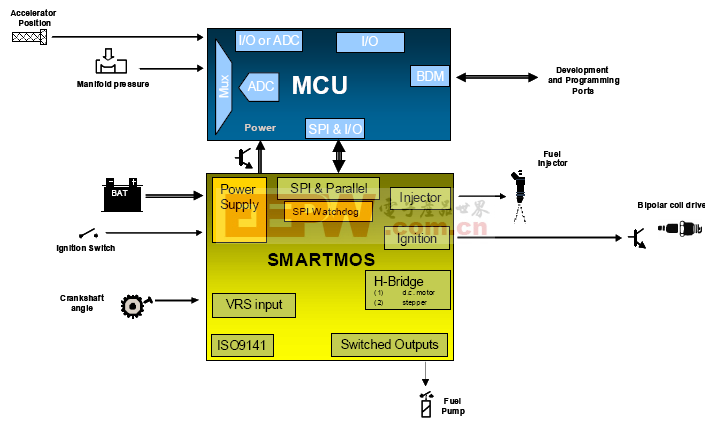
根据控制系统ECU单元的结构,确定其硬件组成如图3.10所示,包括:单片机、电源模块、传感器信号处理模块、控制输出调理模块及驱动控制模块等部分。这些模块构成了ECU的完整控制系统。其中驱动模块包括对EHB系统中电磁阀的驱动模块,以及对高压蓄能器环节中电机泵的驱动模块,这两块直接作用于车辆制动系统中的制动轮缸。下面的章节中我们将对每部分进行研究。
3.3.2系统处理芯片的选用
汽车EHB系统是一种计算机控制系统,其核心部分是电子控制单元ECU.它一方面将采集到的传感器信号A/D转换成数字信号输入到计算机中去进行分析处理,另一方面要将控制信号通过D/A转换成数字信号输出到外部的驱动系统中,而电子控制单元内部CPU通过软件编程来实现各种控制算法,所以电子控制单元是控制系统的重要部分。
目前制动系统采用的单片机是摩托罗拉、英特尔、西门子、英飞凌、飞思卡尔等公司的的16位单片机。EHB系统要求较高数据处理速度,处理器需要完成各种计算,例如加减速度、参考滑移率等。
根据EHB的特性要求,所选用的中央处理器是飞思卡尔公司推出的16位单片机MC9S12,功能强大的片上外设子系统和片上存储器单元完美结合,具有更高的集成度、更丰富的片上资源和更强的处理能力,有助于提高系统性能、减小体积和降低成本。同时,它进一步增强了灵活的功率管理。该功率管理机制有效控制了微控制器在特定状态下的功耗,有效降低了系统总功耗,可长期使用,可靠性高。
MC9S12系列微控制器的特点:
(1)核心CPU:16位的CPU,它管理着MC9S12DG128和外部所有设备的活动,通过芯片的内部总线与MCU各个功能模块通信,通时通过外部总线与系统外设进行通讯。CPU中有6个寄存器,13种寻址方式和400多条指令,内部16为数据通道支持高效、快速的算术操作。
(2)存储器:内部有128KB的Flash EEPROM,2KB的EEPROM,8KB的RAM.
(3)时钟和复位发生器(CRG):包括锁相环时钟频率放大器、看门狗、实时中断(RTI)和时钟监视器(CM)。
(4)带中断功能的8位和4位端口:可编程的上升沿或下降沿触发。
(5)A/D转换接口:2个8通道的10位A/D转换器,连续转换模式,可编程采样时间,多通道扫面方式,拥有外部转变触发控制,转换完成中断等功能。
(6)CAN总线模块:集成了3个CAN控制器—MSCAN12模块,兼容CAN2.0A/B,数据传输速率达1Mb/s,具有5个接收缓冲器,3个发送缓冲器,4个独立的中断通道,具有低通滤波器唤醒功能。
(7)增强型捕捉定时器(ECT):该定时器的可编程计数器为16位,有8个可编程输入捕捉或输出比较通道,4个8位或2个16位的脉冲累加器。四个定标器的16位递减模数计数器。
(8)脉宽调制模块(PWM):有8个输出通道,通过外部编程确定每个通道的周期和占空比,各通道各有一个计数器,可独立控制,8个8通道也可做16个4通道使用,时钟频率可调范围宽,有4个时钟源可选择,周期和脉宽可以被双缓冲。各个通道可分别设置中心对称或左对齐输出,可作为中断输入,有紧急事件可以关断输入。
(9)串行口、总线:芯片内部提供2个同步串行设备接口(SPI),并具有以下特点:全双工、三线同步传送;单个数据引脚的双向传送方式;主机位传送频率最大4MHz,当MCU总线频率等于8MHz时最小为31.25kHz;可程控设置位时钟极性、相位和数据位传送顺序,即可选高位在前或低位在前。2个全双工异步串行通信接口(SCI)。
(10)EEPRO模块与FLASH模块MC9S12XE/S内部集成了4KB的EEPROM存储器与256KB的FLASH存储器,具有单块和整块擦除、编程、灵活保护和安全功能、快速区域擦除和字编程模式特点。
(11)LQFP-112和QFP-80封装选择:DG128芯片具有5V的输入和驱动能力,它的CPU工作频率可高达50MHz,总线频率也可达到25MHz,并可以支持背景调试模式(BDM)。
实际工作时需要采集侧向加速度传感器、车速信号和方向盘转角信号,传感器工作时存在各种干扰,其输出的信号存在着各种噪声信号,为了保证信号的可靠性需要对传感器信号进行滤波处理。硬件电路设计时采用结构简单并且效果较好的π型滤波。
3.3.3电源系统的设计
由于车载蓄电池的电压通常为12 V,对于EHB系统中的飞思卡尔单片机而言需要5V以及2.5V的直流稳定电源。本设计中采用LM2940电源转换芯片。其封装采用TO-220-3的形式。其允许工作电压温度-65℃~150℃,输入电压为26V,输出可调电压范围1.24V~26V最大输出电流为3.5A,电压输出误差小于1%,这样的电源系统足够满足ECU中MC9S12XE/S对电源电压的需求。
3.3.4系统输入通道设计
根据EHB系统中所涉及的各个传感器的基本类型,主要有开关量输入信号传感器、脉冲量输入信号传感器、模拟量输入信号传感器等三大类。
(1)开关量输入信号
开关量主要指常规制动情况下的主动控制功能,驾驶员可以通过脚踏板行程开关选择是否启用这一功能,因此是一种主动控制功能。
(2)脉冲量输入信号
脉冲量输入信号有:轮速传感器脉冲信号。使用定时器T2和捕获寄存器测量两个上升沿(或下降沿)的时间间隔。由于采集进来的现场信号,容易受到环境干扰等因素影响,不能直接输入单片机处理,为了抗干扰,开关量和脉冲量输入经过光电耦合器TLP521与MC9S12单片机连接。TLP521是直流输入NPN输出的光电耦合器在电隔离的情况下,以光电转换原理传输信息,能有效抑制系统噪声TLP521内部结构由发光二极管和光敏三极管组成。工作时,把输入信号加到输入端,发光二极管产生红外光,光敏三极管接收光后,其集电极与发射极导通,实现电—光—电的转换。TLP521主要用于工业控制中,速度不高,主要用来隔离各开关量信号。
(3)模拟量输入信号在EHB系统中,电控系统要求输入的模拟量有:制动油压力传感器,踏板行程传感器等,其输出的是模拟量信息,而系统只能处理数字量的信息,因此要对其进行模/数转换,即A/D转换。可以利用MC9S12单片机的A/D转换模块实现模数转换以及输入采样。由于滤波电路可以滤掉模拟信号中的高频成分,模拟量输入信号经过滤波电路与飞思卡尔MC9S12单片机的模拟量采样口相连。
3.3.5系统输出通道设计
系统输出通道的设计,就是对EHB系统执行机构的控制电路的设计。因此系统控制输出就包括:电磁阀驱动控制电路,电机驱动控制电路。
单片机控制电磁阀开、闭的过程,就是控制电磁阀是否得电的过程。本设计利用的MC9S12输出的PWM信号作为输入,通过驱动MOSFET管使高速开关阀工作,电路中驱动电路采用BTS724G芯片,BTS724G芯片为N沟道垂直功率MOSFET管设计的高边开关驱动器。高边条件下可驱动负载电压为24V的MOSFET功率管。BTS724G具有可输入CMOS的兼容性、较高的电磁兼容性、感应负载的快速退磁性和较宽的工作电压范围5.5V~40V.BTS724G自身提供了嵌入式保护程序,当系统过载或电池接反系统自动关闭MOSFET.通过BTS724G芯片驱动电磁阀的开关,实现系统的增压、保压、和减压。
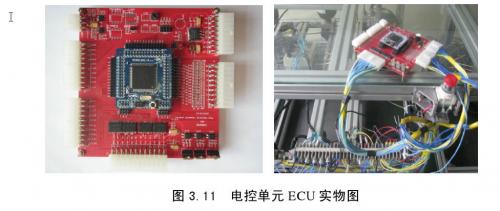
电磁阀驱动控制电机的驱动控制电路是通过大功率MOS管来驱动控制液压泵电机,由液压泵电机带动液压泵,向高压蓄能器管路中注入制动时所需的高压油。图3.11是开发的ECU实物图
3.3.6数据采集系统设计
数据采集系统是EHB台架系统中很重要的一个模块,本文采用的数采系统是基于MATLAB/xPCTarget实时数据采集系统。xPC Target 是MathWorks公司提供和发行的一个基于RTW(Real Time Workshop)体系框架的附加产品,用于产品原型开发、测试和配置实时系统的PC机解决途径。xPCTarget采用了从宿主机到目标机的技术途径,即“双机”模式,两机通过以太网或串口进行通信。
系统主要由硬件系统和软件系统组成,硬件系统主要有宿主机(HostPC)、目标机(TargetPC)、数据采集卡。软件系统包括MATLAB、Simulink、RTW、xPCTarget、C编译器等。
(1)宿主机(HostPC)
宿主机主要用于运行simulink建立模型文件,进行模型参数调整、模型的编译下载以及信号观测。由于xPCTarget采用宿主机(HostPC)和目标机(TargetPC)分离的双机模式。宿主机和目标机之间有串口和以太网两种通信方式。本文采用速度快,距离远的以太网方式。由于要对通讯设备进行配置生成启动软盘。因此要求宿主机包含3.5英寸的软驱和以太网适配卡。采用Windowsxp操作系统,硬件配置要求不高,可正常运行MATLAB程序即可。基于上述条件我们选用普通台式机即可。
(2)目标机(TargetPC)
目标机用于执行生成的代码,目标机在使用过程中只需开关机操作即可,此目标机采用硬盘启动方式,较之通用的软盘或光盘启动更稳定,启动速度快。为了制作启动盘和试验数据采集,目标机应安装了Windows XP和DOS 7.1系统,并且系统盘为FAT32文件系统。基于上述条件本文采用Advantech工控机。
(3)数据采集板卡
本文采用的是Advantech PCL-818H采集卡。PCL-818H是一款100KHz的多功能数据采集卡,能够提供最常用的五种测量和控制功能,这些功能包括:12位A/D转换、D/A转换、数字量输入、数字量输出及计数器/定时器功能。模块性能特点如下:
通道:16路单端或8路差分输入范围:
双极性:±0.625V,±1.25V,±2.5,±5V,±10V
输入过载电压:±30VDC
转换类型:逐次比较型A/D转换
转换速率:最大100KHz精度:±0.01%(读取值),±1位
线性度:±1位
触发模式:软件触发、Pacer触发和外部触发
数据传输:程序控制、中断方式和DMA方式

经过以上对EHB系统执行机构和电子控制单元的设计,及其元件的选型,建立起实验台如图3.12所示。

西门子plc相关文章:西门子plc视频教程
低通滤波器相关文章:低通滤波器原理
行程开关相关文章:行程开关原理 脉冲点火器相关文章:脉冲点火器原理 脉宽调制相关文章:脉宽调制原理 锁相环相关文章:锁相环原理 锁相放大器相关文章:锁相放大器原理






评论