基于SoC FPGA进行工业设计及电机控制

引言
本文引用地址:https://www.eepw.com.cn/article/264457.htm在工业系统中选择器件需要考虑多个因素,其中包括:性能、工程变更的成本、上市时间、人员的技能、重用现有IP/程序库的可能性、现场升级的成本,以及低功耗和低成本。
工业市场的近期发展推动了对具有高集成度、高性能、低功耗FPGA器件的需求。设计人员更喜欢网络通信而不是点对点通信,这意味着可能需要额外的控制器用于通信,进而间接增加了BOM成本、电路板尺寸和相关NRE(一次性工程费用)成本。
总体拥有成本用于分析和估计购置的寿命周期成本,它是所有与设计相关的直接和间接成本的扩展集,包括工程技术成本、安装和维护成本、材料清单(BOM)成本和NRE(研发)成本等。通过考虑系统级因素有可能最大限度地减少总体拥有成本,从而带来可持续的长期盈利能力。
美高森美公司(Microsemi)提供具有硬核ARM Cortex-M3微控制器和IP集成的SmartFusion2 SoC FPGA器件,它采用成本优化的封装,具有减少BOM和电路板尺寸的特性。这些器件具有低功耗和宽温度范围,能够在没有冷却风扇的极端条件下可靠地运行。SmartFusion2 SoC FPGA架构将一个硬核ARM Cortex-M3 IP与FPGA架构相集成,可以实现更大的设计灵活性和更快的上市时间。美高森美为电机控制算法开发提供了具有多个多轴电机控制参考设计和IP的生态系统,使由多处理器解决方案转向单一器件解决方案(即SoC FPGA)更加容易。
影响TCO的因素
以下是影响系统TCO的一些因素。
(1)长寿命周期。FPGA可以在现场部署之后进行重新编程,这延长了产品的寿命周期,从而使设计人员能够专注于新产品开发,实现更快的上市时间。
(2)BOM.美高森美基于闪存技术的FPGA在上电时无需启动PROM或闪存MCU来加载FPGA,它们是零级非易失性/即时启动器件。与基于SRAM的FPGA器件不同,美高森美基于闪存的FPGA无需附加上电监控器,这是因为闪存开关不会随电压而改变。
(3)上市时间。OEM厂商之间的激烈竞争迫切需要更多的产品差异化和更快的上市时间。经过验证的IP模块可大幅缩短设计时间。目前已经可以提供多个构建工业解决方案所需的IP模块,同时更多的模块正在开发中。SoC表现出的另一个独特优势是可以用于调试FPGA设计。为了调试FPGA设计,可以通过用于调试的高速接口,利用微控制器子系统从FPGA中提取信息。
(4)工程工具成本。与FPGA开发工具昂贵的概念相反,美高森美提供用于FPGA开发的免费Libero SoC IDE,仅在开发高端器件时才需要付费。
工业驱动系统
工业驱动系统由一个电机控制器件和一个通信器件构成,电机控制器件包含了驱动逆变器的逻辑和保护逻辑,通信器件则使监控控制能够对运行时间参数进行初始化和修改。
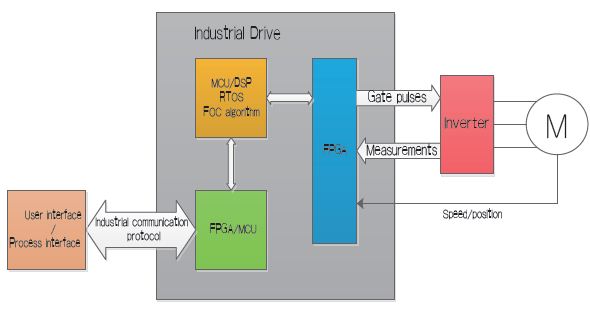
图1:典型工业驱动系统。
在典型的驱动系统(图1)中,可能使用多个控制器器件来实现驱动逻辑。一个器件可能执行与电机控制算法相关的计算,第二个器件可能运行与通信相关的任务,第三个器件则可能运行与安全性相关的任务。
多轴电机控制
传统上,工业电机控制应用使用微控制器或DSP来运行电机控制所需的复杂算法,在大多数传统的工业驱动中,FPGA与微控制器或DSP一起使用,用于数据采集和快速作用保护。除了数据采集、PWM生成和保护逻辑,FPGA传统上并未在实现电机控制算法方面发挥主要作用。
使用微控制器或DSP实现电机控制算法的方法并不容易扩展到多个以独立速度运行的电机(多轴电机控制),美高森美SmartFusion2 SoC FPGA可以使用单一器件来实现集成且完整的多轴电机驱动控制(图2)。
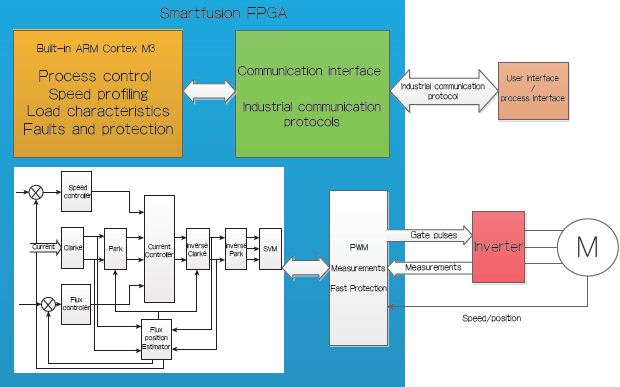
图2:美高森美SmartFusion2 SoC FPGA使用单一器件来实现完整的多轴电机驱动控制。
控制方面可以分为两个部分。一个部分用于运行磁场定向控制(FOC)算法、速度控制、电流控制、速度估计、位置估计和PWM生成;另一个部分则包括速度曲线、负载特性、过程控制和保护(故障和报警)。执行FOC算法属于时间关键型,需要在极高的采样速率下进行(在微秒范围),特别是针对具有低定子电感的高速电机。这使得在FPGA中实现FOC算法变得更优越。过程控制、速度曲线和其他保护无需快速更新,因而能够以较低的采样速率执行(在毫秒范围),并且能够在内置Cortex-M3子系统中进行编程。
晶体管开关周期在驱动中发挥着重要的作用,如果FOC回路执行时间比开关周期短得多,硬件模块可以重用于计算第二个电机的电压。这意味着器件可以在相同的成本下提供更高的性能。
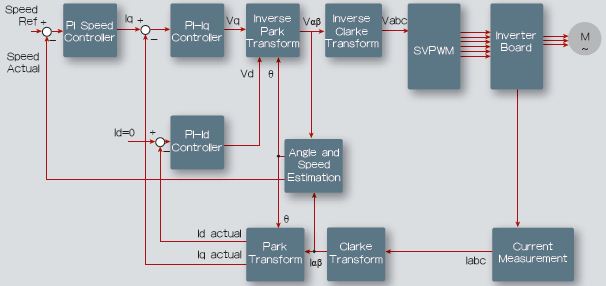
图3:永磁同步电机的磁场定向控制(FOC)框图。
(1)电机控制IP模块。图3为无传感器磁场定向控制算法,这一部分将会讨论这些模块,它们作为IP核提供。
● PI控制器。比例积分(PI)控制器是用于控制系统参数的反馈机制,它具有两个用于控制控制器动态响应的可调增益参数-比例和积分增益常数。PI控制器的比例分量是比例增益常数和误差输入的乘积,而积分分量是累积误差和积分增益常数的乘积。这两个分量被加在了一起。PI控制器的积分阶段可能在系统中引起不稳定,因为数据值不受控制地增加。这种不受控制的数据上升称作积分饱卷,所有的PI控制器实现方案都包括一个抗饱卷机制,用于确保控制器输出是有限的。美高森美的PI控制器IP模块使用hold-on-saturation(保持饱和)算法用于抗饱卷。这个模块还提供附加特性以设置最初的输出值。












评论