飞思卡尔智能车舵机和测速的控制设计与实现

“飞思卡尔”杯全国大学生智能汽车竞赛以快速跑完规定赛道为目标。尽可能提高车模速度,跑出好成绩,是整个车模设计的关键。为了进一步提高车模速度,作者曾在车模调试阶段尝试算法、程序控制等多种方法都无明显效果,经多次分析发现,舵机的优化及其控制尤为重要,特别合适舵机转向和速度检测反馈控制。经过不断改进、调试和优化,该设计方案能够使智能车行驶速度和稳定性都得到显著提高。
1 车模系统
飞思卡尔智能车系统主要由一系列的机械零部件和控制软件组成,主要包括由大赛组委会统一提供标准的车模底盘、轮胎、舵机、驱动电机、PC9S12控制板和电源等,另外,系统中的道路检测装置和测速装置需自行设计安装。图l为车模系统框图。
要赛出好的成绩,智能车除应具有可靠的道路检测装置外,舵机的灵活转向控制则依赖于机械系统中各个零部件间协调运行。为提高智能车的整体协调性能,一定要把握好“车身简捷、底盘低稳、转向灵活、协调匹配”的设计与安装原则。
2 舵机
舵机是操控车模行驶的方向盘。舵机的输出转角通过连杆传动控制前轮转向,其转角精度直接影响到智能车模能否准确按赛道路线行驶,此外,还可考虑采用舵机进行机械闸制动以及多个舵机群控等方法。但飞思卡尔智能汽车大赛规则要求车模中的舵机不能超过3个。
2.1 舵机工作原理
舵机在6 V电压下正常工作,而大赛组委会统一提供的标准电源输出电压为7.2 V,则需一个外围电压转换电路将电源电压转换为舵机的工作电压6 V。图2为舵机供电电路。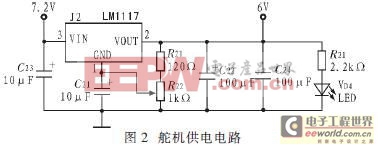
舵机由舵盘、位置反馈电位计、减速齿轮组、直流动电机和控制电路组成,内部位置反馈减速齿轮组由直流电动机驱动,其输出轴带动一个具有线性比例特性的位置反馈电位器作为位置检测。当电位器转角线性地转换为电压并反馈给控制电路时,控制电路将反馈信号与输入的控制脉冲信号相比较,产生纠正脉冲,控制并驱动直流电机正向或反向转动,使减速齿轮组输出的位置与期望值相符。从而达到舵机精确控制转向角度的目的。舵机工作原理框图如图3所示。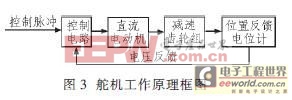
2.2 舵机的安装与调节
舵机的控制脉宽与转角在-45°~+45°范围内线性变化。对于对速度有一定要求的智能车,舵机的响应速度和舵机的转向传动比直接影响车模能否以最佳速度顺利通过弯道。车模在赛道上高速行驶,特别是对于前瞻性不够远的红外光电检测智能车,舵机的响应速度及其转向传动比将直接影响车模行驶的稳定性,因此必须细心调试,逐一解决。由于舵机从执行转动指令到响应输出需占用一定的时间,因而产生舵机实时控制的滞后。虽然车模在进入弯道时能够检测到黑色路线的偏转方向,但由于舵机的滞后性,使得车模在转弯过程中时常偏离跑道,且速度越快,偏离越远,极大限制车模在连续弯道上行驶的最大时速,使得车模全程赛道速度很难进一步提高。为了减小舵机响应时间,在遵守比赛规则不允许改造舵机结构的前提下,利用杠杆原理,采用加长舵机力臂的方案来弥补这一缺陷,加长舵机力臂示意图如图4所示。
图4中,R为舵机力臂;θ为舵机转向角度;F为转向所需外力;α为外力同力臂的夹角。在舵机输出盘上增加长方形杠杆,在杠杆的末端固定转向传动连杆,其表达式为:
加长力臂后欲使前轮转动相同角度时,在舵机角速度ω相同的条件下舵机力臂加长后增大了线速度v,最终使得舵机的转向角度θ减小。舵机输出转角θ减小,舵机的响应时间t也会变短。同时由式(1)可推出线速度口增大后,前轮转向所需的时间t相应也会变短,其表达式为:t=ds/dv (2)
此外,当舵机连杆水平且与舵机力臂垂直时,得到力矩M,可由式(3)表示:M=FRsinα (3)
说明当舵机连杆和舵机力臂垂直时α=900°,此时sinα得到最大值。在舵机力臂R一定和外力F相同条件下,舵机产生的力矩M最大,实现前轮转向的时间最短。
在实际调试车模时发现,这种方法对提高舵机的响应速度也具有局限性:当在舵机输出力矩相同的条件下,力臂越长,作用力越小。在转向遇到较大转向阻力时,会影响舵机对转向轮控制的精度,甚至使转向轮的响应速度变慢;另外,舵机机械结构精度产生的空程差也会在力臂加长中放大。使得这一非线性环节对控制系统的不利影响增大。因此,舵机安装的高度具有最佳范围,仍需通过试验反复测试。














评论