基于总线的分布式水下航行器控制器设计

1 控制器的组成结构
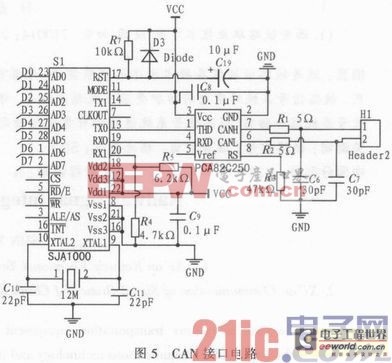
水下航行器控制器由MCU最小系统(JTAG电路、复位电路)、外扩Flash存储模块、I/O接口、隔离电路模块、通讯电路等组成。其系统结构图如图1所示。整个控制器包含4大部分,第一是MCU最小控制系统,包括复位电路和JTAG调试电路。第二是数据采集部分,I/O接口和RS2 32串行接口用于与水下各种传感器相连接,收集传感器发送的实时数据,并传输至MCU进行分析融合。有的传感器送出的是模拟形式的信号,还要使用AD/DA转换模块加以转换后再进入处理中心。数据采集部分还包括一个温度数据收集电路,用作系统运行状态的监控。第三是数据存储模块,主要用于存储和输出实验数据。在水下航行器运行过程中记录航行数据,也可用于调试目的。第四是通讯部分,主要包括CAN总线接口电路,用于与其他节点之间互相传输被控过程的数据和其他控制命令。

2 MCU最小控制系统
文中采用基于ARM7-TDMI架构的NXP2478嵌入式微控制器作为主控计算机。NXP2478以ARM7为内核,它包括一个10/100以太网媒体访问控制器(MAC)、1个带4 kB终端RAM的USB全速设备/主机/OTG控制器、4个UART、两路CAN通道、1个SPI接口、两个同步串行端口、3个I2C接口和1个I2S接口。同时还带有一个4 MHz的片内振荡器、98 kB RAM,以及一个外部存储器控制器来支持上述的各种串行通信接口。以NXP2478为核心的最小系统主要包括电源模块、复位电路和JTAG模块,电源模块实现2个功能:1)电压转换功能,将输入为5 V电平的电压降至NXP2478的3.3 V工作电压。2)稳压稳流功能,微控制器需要纹波比较小的稳定电压供电,电压如果突然下降往往会引起程序的跑飞,因此,必须要有专门的电路来稳定工作电压。一般通过并联大电阻来稳定工作电压。复位电路则可以采用自带看门狗功能的复位芯片来完成。主要实现上电复位、掉电复位、人工复位等功能。看门狗电路可以在程序跑飞时提供自动复位的保护措施。JTAG电路主要实现程序的在线仿真和烧写功能。其电路如图2所示。
3 数据采集电路
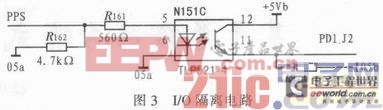
数据采集是指从传感器中获取现场信息的过程。水下航行器控制器所用到的主要是GPS、MTI姿态传感器、深度等传感器。传感器输出信号的标准大多是RS232/485标准.有些传感器的信号需要经过数模转换。因此数据采集电路主要包括RS232/485、I/O接口电路、AD/DA转换电路和隔离电路。NXP2478自身带有4个串行端口,其中有一个为9线制端口,有完整的握手信号。但这些端口的工作电平为0~3.3 V。而RS232的电压约为±12 V左右,所以需要一个电平转换芯片,这里采用常用的MAX232芯片。I/O接口电路也需要进行兼容电平的转换,外部开关信号可能电压幅度比较大,采用隔离芯片既可以保护外部信号串扰对控制器的影响,又可以起到电平兼容的作用。I/O隔离模块如图3所示。
温度监控作为数据采集的一部分,用作检测控制器运行时的温度状态,并提供报警功能。本文采用DS18B20作为温度数据传感器,DS18B 20是一种在分布式温度控制系统中广泛使用的直接输出数字信号的温度传感器,输出数据遵从one-wire bus协议。其采集温度的范围从-55摄氏度到125摄氏度,输出的数字信号可直接进入MCU的I/O口中。DS18B20只有三根信号线:地线,电源线和数据线。因此其接口电路非常简单,将数据线直接接入MCU的GPIO口即可。











评论