基于单片机的超声波汽车报警系统的设计

本设计采用单片机与超声波结合的倒车报警系统除具有普通倒车雷达的作用外,用户还可以根据个人的需要设定汽车离阻挡物报警的距离,同时还可以实时监控到汽车倒车的时候离阻挡物的距离;另外本系统除具有语音报警外,还可通过分段指示灯,实现声与光的实时监控。
1 系统框图
此倒车报警系统主要是利用超声波的特点和优势,将超声波测距的原理和AT89C52单片机结合于一体,设计出一种基于单片机的汽车倒车报警系统。该系统采用软、硬件结合的方法,具有模块化和多用化的特点。
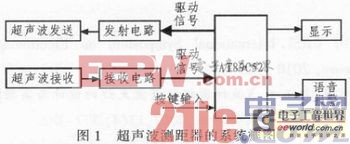
根据设计要求并综合各方面因素,采用AT89C52单片机作为主控制器,用动态扫描法实现LED数字显示,超声波驱动信号用单片机产生。超声波测距器的系统框图如图1所示。
2 硬件电路设计
2.1 硬件电路框图
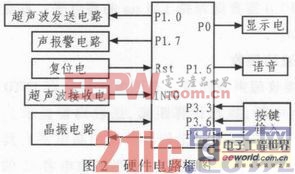
单片机AT89C52作为主控器,上电复位。XTAL1和XTAL2接12 MHz晶振与电容构成的时钟电路。P1.0控制由555定时器及超声波换能器CSB40T组成的发射电路发射超声波。超声波信号碰到障碍物时信号立刻返回,经传感器,滤波电容,放大器,电压比较器传给单片机的INT0口一个低电平。P1.1、P1.2、P1.3和P1.7分别控制绿、黄、红指示灯和蜂鸣器。P0口接4位共阳极数码管,P2口的低四位控制数码管的位选。其硬件框图如图2所示。
2.2 超声波的计算
超声波测距的原理如图3所示,即超声波发生器T在某一时刻发出一个超声波信号,当这个超声波信号遇到被测物体后反射回来,就会被超声波接收器R接收到,此时只要计算出从发出超声波信号到接收到返回信号所用的时间,就可算出超声波发生器与反射物体的距离。
该距离的计算公式为: ![]()
其中,d为被测物与测距器的距离;s为声波往返的路程;v为声速;t为声波往返所用的时间。
由于超声波也是一种声波,其速度v与温度有关,在使用时,如果温度变化不大,则可以认为声速是基本不变的。如果测距精度要求很高,则应通过温度补偿的方法加以教正。声速确定后,只要测得超声波往返的时间,即可求得距离。为了增强系统的可靠性,应在软硬件上采用抗干扰措施。
2.3 发射电路设计
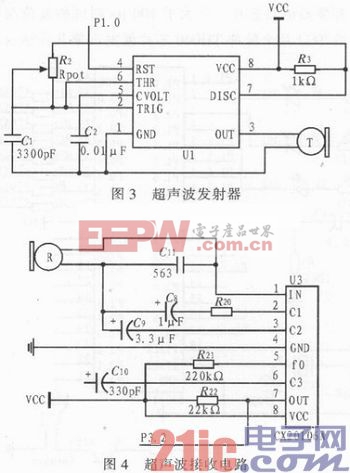
超声波发送电路包括超声波产生电路和超声波发射控制电路两个部分,超声波探头(又称“超声波换能器”)选用CSB40T。40 kHz的超声波是利用555时基电路振荡驱动超声波探头产生的。
超声波发射电路图如下图3所示,其中R2为可调电阻的目的是为了调节信号频率,使之与换能器的40 kHz固有频率一致。
555定时器的3脚是复位端,利用它来控制超声波脉冲的发射。当4脚为高电平时,555有振荡脉冲输出;为低电平时,555定时器清零,没有输出。因而,将4脚与单片机的控制信号相接就可以控制发射电路。为保证555时基电路具有足够的驱动能力,宜采用+12 V电源供电。4脚为超声波发射控制信号输入端,由单片机P1.0进行控制。
2.4 接收电路设计
集成电路CX20106A是一款红外线检波接收的专用芯片,常用于电视机红外遥控接收器。考虑到红外遥控常用的载波频率为38 kHz与测距的超声波频率40 kHz较为接近,所以可以利用它做超声波的检测接收电路。
超声波测距系统的接收电路如图4所示。超声波接收换能器将接收到的回波信号转换后经过0.056μF的电容初步滤波后,进入CX20106A的1脚,经过CX20106A的前置放大器,限幅放大,带通滤波器(中心频率为40 kHz),检波器及比较器,最后经过内部的整形电路,从7脚输出至AT89C52单片机的外部中断0(P3.2)口。当芯片接收到40 kHz的信号时,7脚的输出由高电平转为低电平,单片机外部中断0口检测到输入信号的下降沿或低电平时,立即产生中断,同时停止定时/计数器,从而得到超声波的回波时间t。

电路图符号相关文章:电路图符号大全
负离子发生器相关文章:负离子发生器原理 尘埃粒子计数器相关文章:尘埃粒子计数器原理 蜂鸣器相关文章:蜂鸣器原理 晶振相关文章:晶振原理










评论