三大场景,这款伺服控制器这样点亮生活

伺服控制器是一种用于精确控制电机运动的电子设备,通过接收来自控制系统的指令以及监测电机的位置、速度等参数,实现对电机的精确控制。基于高精度、高速度、高可靠性等优点,在制造业、航空航天、医疗设备等领域有广泛的应用。
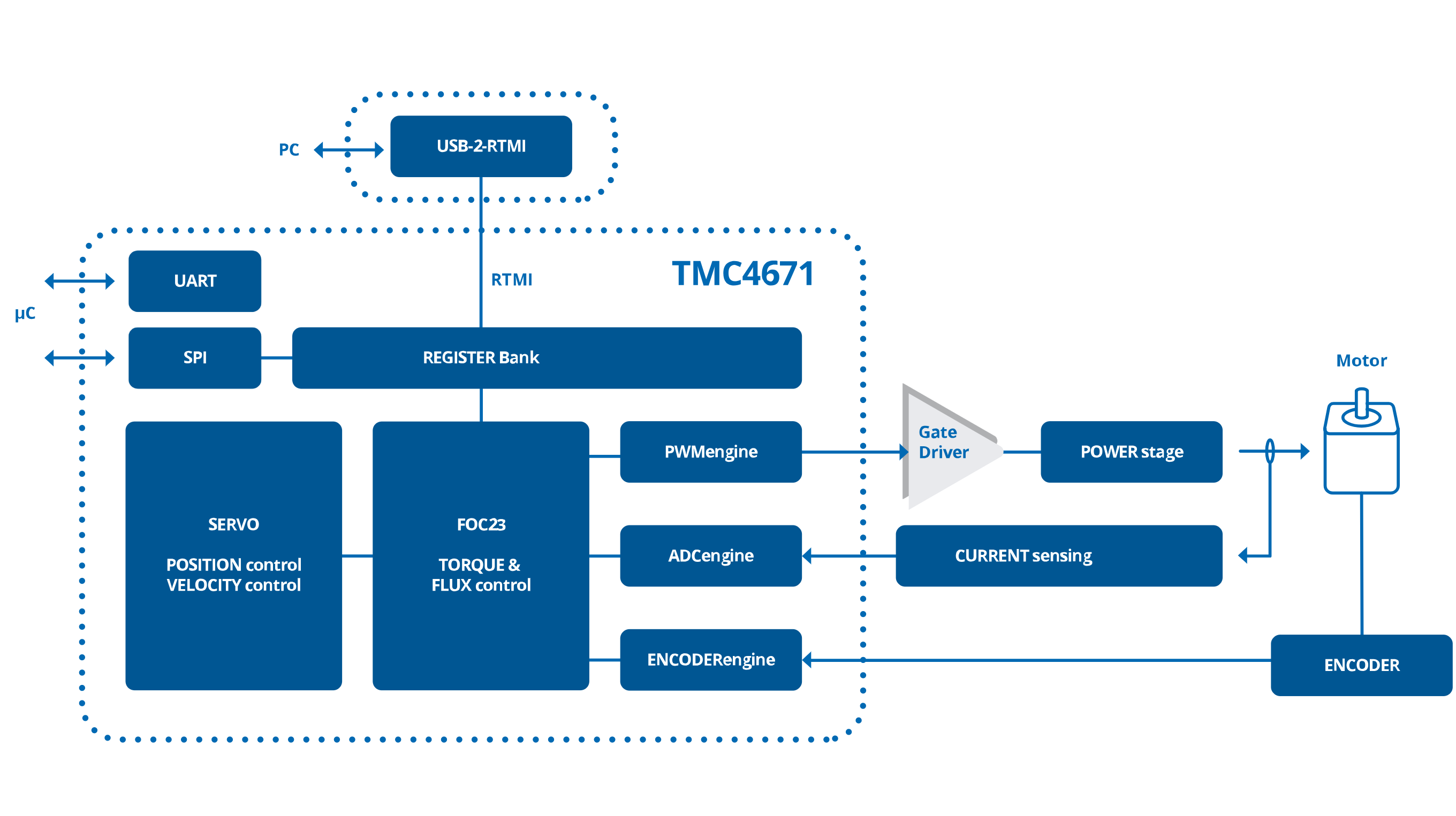
本文引用地址:https://www.eepw.com.cn/article/202312/453944.htm伺服控制器的关键是伺服控制芯片,例如ADI旗下的TMC4671就是一款完全集成的伺服控制芯片,可以为直流无刷电机、永磁同步电机、步进电机、直流有刷电机和音圈电机提供磁场定向控制。其特点是所有的控制功能都被集成在硬件上,例如集成了ADC、位置传感器接口、位置差值器,该款功能齐全的伺服控制器适用于各种伺服应用。本文以三个用例,看伺服控制器如何点亮生活。
具有自主诊断功能的静音正压睡眠呼吸机
睡眠呼吸机是用于治疗在睡眠状态下病人上呼吸道阻塞的一种设备。睡眠时上呼吸道阻塞会造成鼾声、血氧降低、代谢紊乱等状况,长期会导致或加重各种慢性疾病。睡眠呼吸机通过对患者呼吸道持续输送一定压力的气流,从而形成气体支架,支撑患者的气道开放,保证患者的呼吸通畅,消除鼾声以及阻塞性睡眠呼吸暂停低通气综合征(OSAHS)所带来的负面影响。

多数使用正压睡眠呼吸机的患者是在睡眠期间使用该设备,所以呼吸机的通气舒适度及静音性能是其重要的产品设计指标。另外,睡眠呼吸机的一项重要功能之一,是能在系统发生异常时,及时发现并立即采取适合的保护措施,其核心要点即是呼吸机风机的控制。
正压睡眠呼吸机硬件设计方案使用TMC4671+TMC6200的组合,可以大大降低高性能电机驱动器设计的门槛,使用户可以非常快速地搭建相关的高性能电机应用,无需编写复杂费时的底层驱动,节省了了大量的调试时间。此外,相关诊断功能使工程师在调试初期可快速定位系统故障,配合TMC IDE,用户可以方便地进行系统辨识和控制参数优化,加速产品设计定型。如此一来,用户可专注于产品本身的设计优化,这是未来电机控制应用的方向。
电机控制核心FOC算法及控制由TMC4671完成,功率驱动部分及电流采样使用TMC6200完成。TMC4671极大简化了电机控制部分的算法,解放了MCU的算力,使用户可以专注于系统应用级的设计,如更适于患者的压力流量曲线等。通过压力传感器反馈,压力值经由MCU进行运算后,其输出作为TMC4671的速度给定信号,TMC4671输出风机控制SVPWM信号给TMC6200,TMC6200作为MOS管门级驱动,控制三相H桥以驱动电机运行,使呼吸机压力保持在需要的值或按给定的曲线变化。
基于TMC4671的+TMC6200的方案,可以带来三大系统优势:涵盖极高动态的电机转速范围——双水平模式下,电机转速范围会在10000rpm以内及25000rpm以上快速切换,转速切换时间可低于0.5秒;此外,该方案还可维持尽可能小的噪声,呼吸机压力为10cm水柱时一般要求低于30dB,高端的产品可以做到23dB及以下;第三,具有灵活方便的系统诊断和保护机制——以方便的结合驱动器信息及相关传感器定位相关异常事件,包括呼吸面罩脱落、呼吸管路漏气、风机堵转等等。
设计下一代电动自行车,助力超能力骑行
下一代电动自行车的许多创新将是电动机驱动器和储能系统的触发,其中最重要的可能将集中在控件和用户界面系统的改进,这些控件提供了更好的总体用户体验,并使电动自行车能够适应骑手的需求。
TMC4671为电动自行车制造商提供了其他方法来定制其产品的用户体验,包括将转矩/速度曲线微调到其客户的预期使用情况。控制器还可以通过监视其加速度传感器并闪烁尾灯,以在检测到自行车骑手急剧制动时提醒其他驾驶员,从而提高用户安全性。下图是由ADI Trinamic开发的实验性电动货运自行车,是新一代电动货运自行车的试验台,具有高效的驱动控制系统,再生制动和其他新功能。

TMC4671智能电机控制器为基于BLDC的电动自行车驱动系统提供了完整的解决方案。控制器功能强大的集成MCU可以进行编程,以提供自定义用户体验,并遵守有关最大速度和对踏板输入的响应的区域性法规。因此,ADI致力研究传感方案和控制算法,以使自行车的电动机以对称的方式做出响应,并在骑手开始踩踏板时立即将扭矩传递至驱动轮。减少或消除非对称辅助的最具成本效益的方法是使用来自左踏板的输入来估计在右脚提供扭矩的那部分行程期间应提供的支撑量。
由于电动自行车很可能会以非线性方式加速,因此计算右踏板行程的电动机电流的算法不能简单地匹配左踏板的最新扭矩读数。ADI通过一种预测算法解决了这个问题,该算法使我们的控制器能够在踏板旋转的两个半圈期间提供平稳,平衡的辅助。相同的算法使用踏板扭矩输入来使电动自行车能够从死点处提供一些辅助,然后自行车滚动后过渡到速度/扭矩模式。
高效、精确的电机控制方案加速机器人开发
随着机器人技术的不断发展,对高性能电机控制器的需求也日益增多,电机控制面临诸多性能上的挑战,例如高精度位置控制和运动控制,快速响应和灵活性、平滑的运动特性,以及动态性能和调速范围、控制特性的连续性和直线性等等。

以广泛应用的AGV小车为例,在运动过程中涉及到人身安全、仓储运行碰撞安全以及货物安全等原因,所以它必须要有一个高精度的定位、运行及轨迹运行控制系统。要实现这一点,必须有一个可靠、高精度的伺服控制器来实现这一套轨迹运行。安全性极高的运动控制系统,绝大多数情况下首选为伺服驱动器,但是传统的伺服驱动器存在多方面的问题,例如体积大、价格昂贵,安装与操作极其复杂,复杂的伺服算法等。
TMC4671作为一种先进的电机驱动器芯片,为机器人应用提供了高效、精确的电机控制解决方案。此外,TMC4671采用先进的电机控制算法和功率电子技术,具有高速度、高精度和高效率的特点。它能够提供出色的电机控制性能,满足各种机器人应用的需求。而TMC4671提供简单的接口和配置选项,更方便用户进行配置和控制。通过使用少量的外部元件,可以轻松地将TMC4671集成到机器人系统中。


评论