音圈电机伺服驱动器与运动机构设计
摘要:为满足一类音圈直流伺服电机的高速振动定位精度工作的精度需求,研发了一种高性能的音圈电机高精度位置定位设备。基于ARMCortex M3系列的STM32F103VCT6处理器设计了音圈直流伺服电机控制系统。分析了该伺服系统结构的组成,研究结果表明:设计的高精度位置伺服系统,能满足位置超调量小于10 counts,稳态调整误差为土1 count的系统参数指标。实现了音圈电机高速振动下控制器对光栅传感器实时采集并且高速处理,以及对音圈电机位置的快速调整,完成对音圈电机的高速振动定位精度的控制。
本文引用地址:http://www.eepw.com.cn/article/284997.htm随着运动伺服控制技术的迅速发展,音圈电机伺服控制系统应用于在高速、高频精密定位系统:机器人触觉、智能弹药电动舵机、航空航天相机像面扫描等[1]。
音圈电机伺服控制在国外已经发展很多年,特别是德国、美国、日本已经把音圈电机伺服控制系统应用于军事、航天、航海等领域,控制精度可以达到纳米级。国内一直停留在科研院校研究阶段,在实际工程应用上与国外相比还有差距,这个差距不仅表现在技术上,国内传感器的精度还不高,也是制约我国这方面技术的瓶颈。最近几年,随着科研单位的足够重视,音圈电机的伺服控制还在不断发展之中[2-3]。本课题的创新点是实现了驱动系统、控制系统和运动机构的一体化设计,通过三闭环控制、分段控制等,实现了位置的精确控制。
1 音圈电机原理和机构

音圈电机是基于洛伦兹力设计出来的,其工作原理为洛伦兹力原理[4]:F=kBLIN 。
其中洛伦兹力为F,磁场强度为B,电流为I,线圈的匝数为N,k为常数。通过给线圈供电,线圈带动执行机构直线运动。如图1所示,是音圈电机的机械结构。
2 音圈电机的控制系统
音圈电机伺服系统的构成包含执行器、控制器、反馈装置等部分,如图2。

2.1 音圈电机控制器
音圈电机闭环控制系统的核心就是控制器STM32F103VCT6,它是一款高性能的微控制器,在电机控制领域的应用非常广泛[8-9]。其引脚图如图3所示。

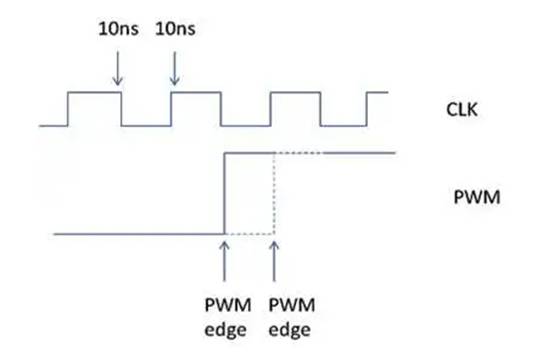
本文采用STM32F103VCT6的TIM3作为编码器接口,读取编码器的旋转产生的脉冲数, TIM3的CH1(PA6)作为编码器1的A相的输入,CH2(PA7)作为编码器2的B相的输入。TIM1的CH4(PA11)作为PWM信号输出,设置PA13为DIR信号输出。
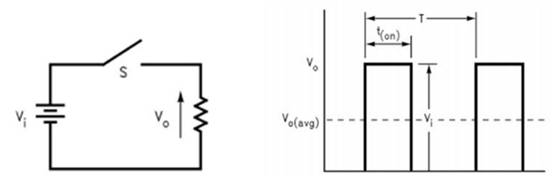
2.2 电机驱动电路设计
音圈电机伺服系统采用PWM方式调速,驱动器可以采用分立元件晶体管或者MOS管来搭建H桥电路,经过反复试验,自己搭建的H桥电路不够稳定,发热量大,最后采用功率集成芯片H桥组件LMD18200[10],STM32输出的PWM信号和DIR信号经过H桥集成芯片LMD18200放大,进一步控制音圈电机的运动。
在本系统中,通过STM32F103VCT6产生控制信号,控制信号包括PWM信号、DIR信号和BRANKE信号。如图4所示为LMD18200的原理图。

本文来源于中国科技期刊《电子产品世界》2016年第1期第65页,欢迎您写论文时引用,并注明出处。












评论