激光雷达VS毫米波雷达:无人驾驶创业苦与乐

现今,自动驾驶已成为业界的一个热门话题,不管是以通用、福特、奔驰等为代表的传统汽车厂商,还是以特斯拉、蔚来汽车等新能源汽车厂商,亦或是像滴滴、Uber 这样的共享汽车平台,都竞相在这片热土中驰骋。
本文引用地址:https://www.eepw.com.cn/article/201704/358536.htm关于自动驾驶技术相关的传感器,目前主要有视觉、激光雷达、毫米波雷达等,三者在功能上各有优势,在一台车子上,一般需要两者或两者以上结合使用。在应用层面上,就目前而言,主要分为两派,一个是以特斯拉为代表的视觉摄像头+毫米波雷达解决方案,另一个则是以 Goolge,百度等为代表的采用激光雷达以实现全自动驾驶的阵营。
在本期的 ACT TALK 中,我们邀请了激光雷达、毫米波雷达相关的两名创业者——速腾聚创创始人 & CEO 邱纯鑫以及杭州智波科技董事长袁帅分别讲述这两项技术应用、市场拓展状况以及对多传感器融合的看法。
速腾聚创邱纯鑫:低速车领衔无人驾驶,激光雷达将越做越小
邱纯鑫在机器人环境感知技术方面有着十余年的研发经验,在 2014 年成立速腾聚创,专注激光雷达的研发。他认为,新能源汽车(锂电池、充电桩等)、自动驾驶(激光雷达、摄像头、毫米波雷达等)、共享经济(大数据、高精度地图)这三股力量正在共享无人驾驶汽车这个亿万市场。
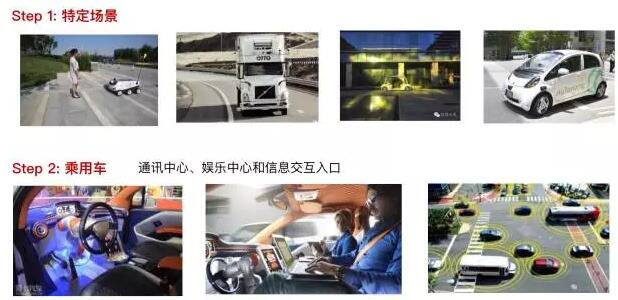
另外,邱纯鑫还表示,实现无人驾驶的第一阶段,即利用自动驾驶技术实现载物、载人的功能,其中,低速车(针对特定场景的快递车、区域出租车等)仅应用在封闭园区内,不容易对人、物等造成重大伤害,因此相较于其他公路车辆更容易落地。乘用车(如公共汽车、出租车等)则是无人驾驶汽车的第二阶段,相较于第一阶段,增加了通讯、娱乐和信息交互入口。
无人驾驶涉及到高精度地图、环境感知、决策规划、车辆控制这几个重要环节,其中,环境感知是难度系数最大、工程量最复杂的一环。包括激光雷达、摄像头、毫米波雷达、GPS+IMU、编码器等传感器技术的研发和测试。
与毫米波雷达、摄像头这两种方案相比较,激光雷达具有探测距离远、测量精度高的优势,但劣势就在于,无法应对雨雪、雾霾天气,且不具备摄像头能识别路标、车牌的功能。
邱纯鑫表示,利用激光雷达的优势,通过点云算法,能实现路沿检测、障碍物识别、定位与地图创建的功能,另外通过融合算法,进一步实现车道线、障碍物的检测,以及动态物体跟踪。三维图像呈现的即时性使得后期数据处理工作得到大大缩减。

前不久,速腾聚创宣布旗下多线激光雷达产品已做好量产准备,供货周期大约为四周,是目前国内首个宣布量产的激光雷达厂商。
接下来,速腾聚创将继续让多线激光雷达的研发和量产提上日程,在现有基础上,把雷达核心芯片化,降低产品的成本,提高规模量产的能力及稳定性,推进产品在多个领域内的应用。
目前,国内外厂商的激光雷达个体体积都相对较大(例如 Google 用的 velodyne 64 线激光雷达就如顶着一个大花盆),邱纯鑫表示,未来,激光雷达有望被做成普通摄像头般大小。

速腾聚创创始人 & CEO 邱纯鑫
智波科技袁帅:高精度毫米波雷达的实现是个漫长的过程,国产替代进口并非不可能
相比激光雷达,毫米波雷达技术已十分成熟,且有相当长的历史(始于上世纪 60 年代)。智波科技董事长袁帅表示,毫米波雷达是除视觉摄像头以外的另一个成熟方案,被应用的频率也在不断提高。
相比摄像头、激光雷达,毫米波雷达具有可穿透灰尘、雨水这一点绝对优势,因此可全天候工作且不受天气影响。
据介绍,目前市面上的毫米波雷达有 24GHz,77GHz 两种规格。其中,77GHz 毫米波雷达主要用在车的正前方,用于对中远距离物体的探测,24GHz 毫米波雷达一般被安装在车后方,用于盲点检测。另外,视觉摄像头在自动驾驶实现预警功能,而控制的实现则离不开毫米波雷达的配合。
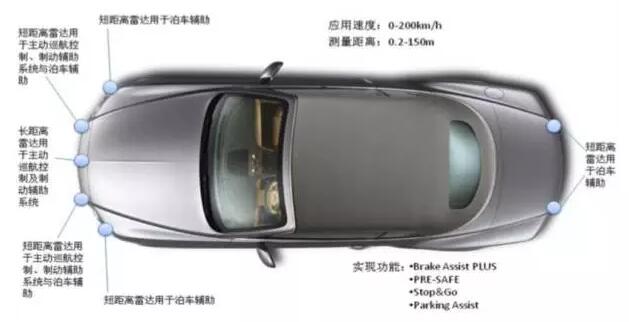
奔驰 S 级毫米波雷达配置(车前 5 个,车后 2 个)
目前的毫米波雷达的主要缺陷在于精度还不够完美,例如无法非常精确的将两个物体进行区分,而视作一个物体的情况。袁帅表示,只要毫米波雷达的波长、带宽足够,其成像效果也能与激光雷达相媲美,当然,实现成本也不低。而在国外,79~81GHZ 的毫米波雷达技术已进行预研阶段,正在为实现无人驾驶蓄势待发。



评论