ADIS16355的汽车二自由度数据采集系统设计

摘要:为了得到汽车在行驶过程中的横摆角速度与侧向加速度,设计了基于ARM微控制器和ADIS16355传感器的数据采集系统。介绍了该采集系统的工作原理和ADIS16355的SPI通信协议。采用实车实验的方法得到了汽车的横摆角速度与侧向加速度,并且通过统计方法对采集到的数据进行了分析。选用卡尔曼滤波方法对采集的数据进行了滤波,成功地滤除了白噪声,实验证明得到的数据是可靠的。
关键词:ADIS16355;数据采集系统;SPI;卡尔曼滤波
引言
汽车的二自由度横摆角速度与侧向加速度这两个参数对汽车的稳定性分析具有重要作用,是汽车主动安全的重要组成部分,可以通过预测与实测两种方式获得。为了得到更真实的数据,本文设计了基于ARM微控制器和ADIS16355传感器的数据采集系统,通过实车测试得到了汽车的横摆角速度与侧向加速度的数据,分析了干扰源,并且对数据采用卡尔曼滤波方法进行处理。
1 系统工作原理
ADIS16355传感器装在接近汽车的中心位置上(接近汽车的质心位置),建立汽车的三维坐标系如图1所示。
即相当于从控制器的从机选择端,在通信过程中要使它一直保持低电平,处于有效状态;然后,通过主控制器把需要采集信号的地址发送到从控制器中。SPI时序图如图4所示。
然而汽车运行中不可避免会受到其他因素的干扰,采集到的数据可能存在一定程度上的失真性,因此需要找出干扰源的类型,从而选择适当的方法把杂波滤掉,得到相对准确的数据。为此设计汽车怠速与正常运行两种模式。汽车在怠速状态下,由于汽车是相对静止状态,理论上测到的汽车横摆角速度与侧向加速度为0,然而由于存在其他的干扰因素,因而实际测得的数据并不为0。通过对测试数据的分析可以得到干扰源的类型,从而根据干扰类型而设计出相应的滤波方式。下面分别就汽车的怠速模式与正常运行模式两种运动方式具体分析。
3.1 汽车怠速模式
汽车怠速模式是指发动机处于启动状态,但是汽车处于停止不前的状态,可以测得相应的数据。这里以汽车的横摆角速度数据进行分析,取了2500个采样点,利用数据的统计特性对数据分别求均值、协方差与功率谱密度,求得的均值为-7.7682e-005,近似为0。为了直观,把采集到的源数据、协方差与功率谱密度通过MATLAB作图的方式显示出来,如图6所示。
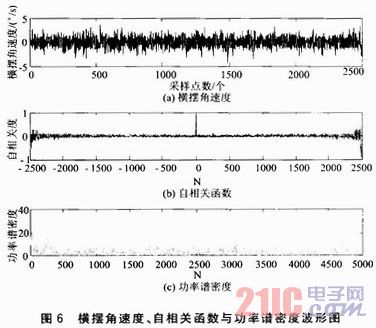
由图可知,自相关函数只有在横坐标为0时候才有取值,功率谱密度分布比较均匀,而且采集到的数据均值近似为0,这与高斯白噪声的统汁特性相似,因而断定干扰源类型为高斯白噪声。
3.2 汽车正常运行模式
汽车正常运行模式是汽车匀速行驶在水平、下燥、水泥路面上,测得此时的汽车横摆角速度与侧向加速度。从传感器采集到的数据不可避免地受到干扰源的影响,由上面给出的结论可知干扰源类型为白噪声。卡尔曼滤波前的数据与滤波后的数据如图7所示。卡尔曼滤波对白噪声具有很好的滤波能力,它的滤波原理是最小均差原理,并且当前的数据只与前一个数据有关,数据存储量小,有利于计算机求解,所以选用卡尔曼滤波方式对采集到的数据进行滤波,从而得到相对准确的数据。这里采集了10 000个数据点。
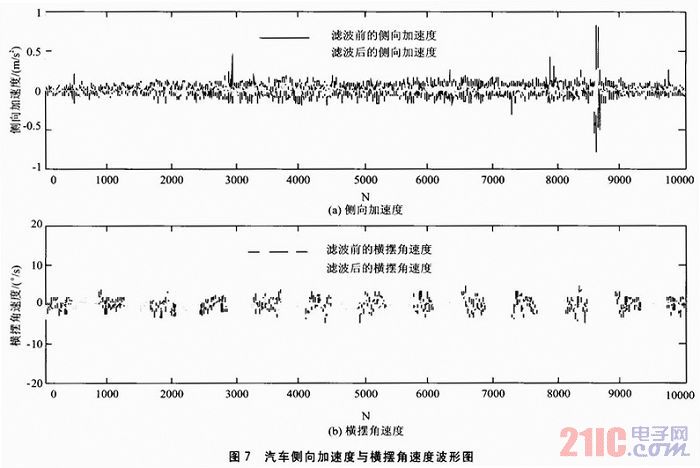
由图7可以看到,通过卡尔曼滤波后,曲线更加平滑,有效地剔除了杂波,从而为控制系统提供更准确的数据。
结语
本文采用ARM微控制器和ADIS16355传感器设计了一种数据采集系统,不但能够采集汽车的横摆角速度与侧向加速度两个参数,而且用卡尔曼滤波方式对采集到的数据滤掉了杂波,使得到的数据更为准确。经分析表明,该设计方案是可行的。这种数据采集系统在汽车主动安全方面有很好的应用价值,能为汽车稳定性分析供准确的数据。










评论