车辆安全距离智能控制与自刹车系统

摘要:为避免两车在同车道行驶中因追尾发生交通事故,本项目根据追尾事故的产生原因研制了车距安全距离智能控制与自刹车模拟系统。本模拟系统运用霍尔传感器以及加速度传感器测量后车车速Vb、采用超声波回波测距原理测量前后车的车辆间距△S,利用stm32f103zet6单片机处理数据,并根据两车的运行状况,后车自动调整行驶速度,从而实现后车与前车的安全车距的智能控制。实际测试表明,本系统可以实现安全车距的智能控制,达到设计要求。
关键词:车辆安全;模拟;ARM Cortex—M3;智能控制
近几年全国道路交通事故中,追尾事故约占全部交通事故的1/10。随着社会经济的发展,私家车的增多,近年来道路交通拥堵现象十分严重。人们不能及时控制车速以及人操作反应时间的延迟是造成这些问题的主要原因。要解决这些问题,可以将行车手动驾驶变为自动驾驶,而要实现自动驾驶就必须实现车辆速度的精确测量。本项目首先改进了速度测量方式,用加速度传感器补偿传统霍尔传感器测速的误差,实现速度的精确测量,其次精确测量前后车距,通过自动控制算法,实现安全车距的智能控制。
1 系统总体设计
该模拟系统结构图如图1所示,通过速度测量模块和车距测量模块得到实时数据,将得到的数据送到stm32f单片机(stm32f单片机是一款基于ARM—CM3内核的32位微处理器,系统主频72 MHz,低功耗,功能强大)的数据处理单元进行运算和处理,将处理结果送至车距智能控制单元,从而实现车速的控制和车辆安全距离的智能控制。
两车相对速度vr,的测量:
以运动的后车为参照物,测取前车相对速度,实验原理为:以时间T为间隔,连续两次发射超声波,通过获取两次的相对距离得到相对速度。根据车辆的相对速度,获取前车的运动信息,从而为后车速度调整提供依据。
2.3 安全车距智能控制实验原理
根据车辆性能,设定自动控制算法的安全距离。根据vb、△s、vr,采取闭环控制,实时自动调整后车速度,使后车与前车保持安全距离,实现安全车距智能控制和自刹车,其原理如图2所示。
3 测试数据、技术参数和技术性分析
保证超声波测距系统及霍尔器件测速的准确性,是实现本系统车距智能控制的关键。在实验中我们对相关参数进行了测量和分析,记录和分析如下。
3.1 超声波测距模块的实验数据及分析
1)超声波测距模块的实验数据
实验方法:先精确确定超声波测距模块与前方障碍物的距离,此距离即是实际距离。然后启动超声波模块,得到测试数据。
2)实验数据分析及结论
根据测试数据以及数据对比分析可知,两条数据曲线吻合较好(如图3所示)。超声波模块与前方障碍物距离小于200 cm时,测试相对误差的最大值为3.28%,且随距离的增加而增大;超声波模块与前方障碍物距离在大于200 cm时,相对误差显著增加。
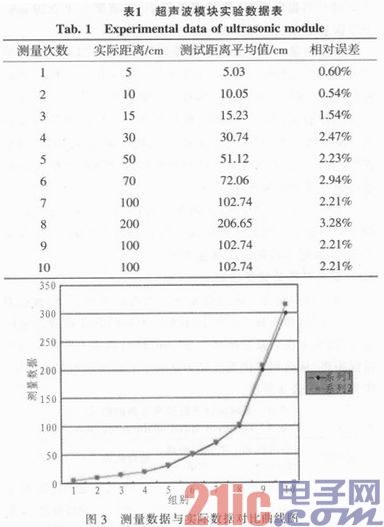
误差产生的主要原因是模块安装位置与障碍物之间的角度随距离的改变而产生,该误差可根据产生的原因在算法中加以修正。
本作品系统中,超声波模块安装在后车的车头正前方,后车车头与前车车尾的距离(即两车的安全距离)设置在200 cm以内,由以上数据分析可知,该距离范围测试误差和绝对误差均较小,可见,超声波测距模块满足本系统的设计要求。
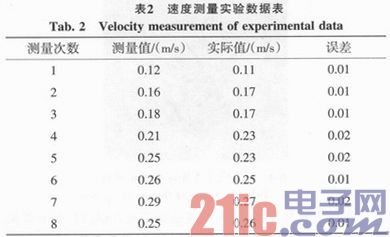
3.2 速度测量的实验数据及分析
1)速度测量的实验数据
实验方法:本系统采用霍尔传感器进行速度测量,利用加速度传感器对速度进行辅助测量提高系统测速的准确性,实验中,我们通过将显示数据与实测数据进行比较,得到以下数据。
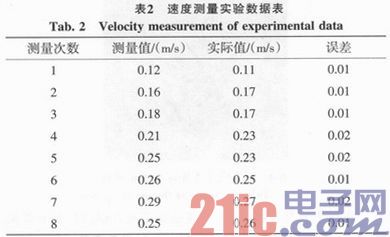
2)实验数据分析及结论
通过以上数据分析可知:小车速度为0.12~0.29 m/s时,速度测量的稳定性好,测量误差较小;当速度大于0.29 m/s,测量误差增大。
速度测量产生误差的主要原因是:本套模拟系统中使用的模型小车,其车轮较小(直径5.5 cm),使得霍尔传感器测速模块中安装在车轮上的磁珠的个数过少(3个),车轮旋转一周所能获得的信号脉冲个数只有3个,使得测量误差较大。误差修正方法有2个:方法一,采用加速度传感器来减小误差;方法二,采用相同原理的光电码盘测速器替代霍尔传感器进行脉冲信号采集。
本作品中,小车的运行速度为0.12~0.29 m/s,另外由于加入了加速度传感器来修正霍尔传感器的测量输出,使得误差较小,满足本模拟系统测速要求。
3.3 安全车距的智能控制
为检测本安全车距保持系统是否达到要求,我们通过固定一个路标(停车标志位),让小车以不同的速度通过设定的参考线,参考线与路标距离为50 cm,然后测量小车停车时与路标距离,从而判定该系统是否达标。实验现场如图4所示。实验数据如表3所示。
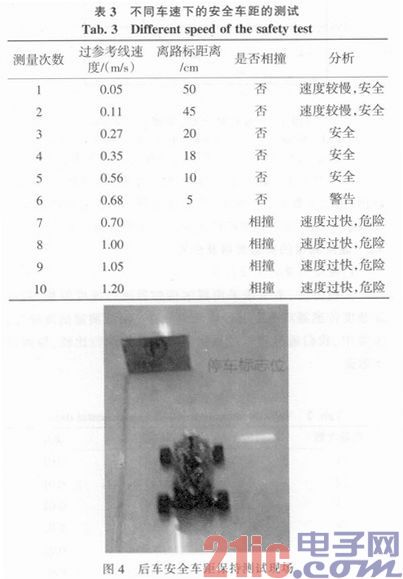
由以上数据分析可知:当速度低于0.7 m/s时,本套模拟系统能实现安全车距的智能控制和自刹车系统的功能。当汽车超速时,最大安全车距可根据车速调整,保障行车安全。
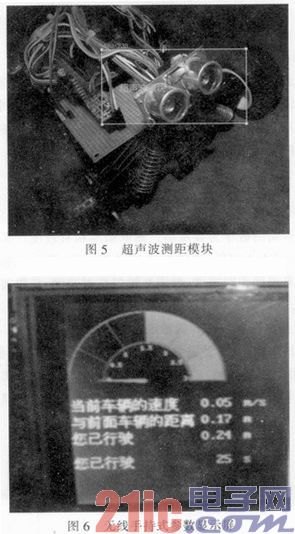
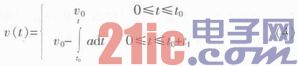
本系统的测距模块、无线的系统运行参数显示模块如图5、图6所示。人性化的无线手持式参数显示屏能清晰、实时地显示系统的速度、里程、和前车的距离等参数。
4 作品的科学性与先进性
1)测速方式
目前国内大多数测量汽车车速的方法采用霍尔传感器进行速度测量,然而在实际生活中,特别是在高速公路上行车,常常会发现汽车码盘表的显示速度大于实际的车速。而这个误差并非由于传感器的精度问题,而是车轮由于抓地不好打滑造成的。霍尔传感器的测速是通过测量汽车的车轮转速从而转化为汽车的行驶速度的。为了改善这个问题,我们采取测量汽车线加速度获取速度的方式来弥补这种测量方式带来的误差。
2)安全车距控制
根据车辆性能设定安全车距后,在行驶中,改变前车速度,后车能完成自动跟车并调整速度,不与前车发生追尾。本模拟系统还可以实现车距保持功能和车距警报。
3)自动刹车系统
实际车辆制动的过程是一个匀速运动与匀减速运动的叠加,如图7所示,车速v(t)是一个简单的分段函数:
其中v0是采取制动措施前的车速,a是平均制动减速度。
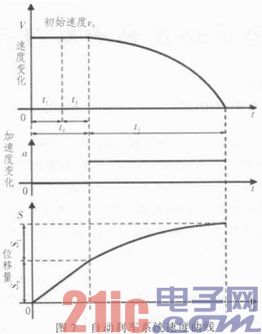
对车速v(t)积分,可得制动距离:
![]()
在检测到前方有静止障碍物时,汽车可启动自动刹车功能,紧急制动,防止相撞,智能行车模式降低了驾驶员的疲劳度。
5 结论
车辆安全距离智能控制与自刹车模拟系统通过速度的准确测试和自动控制算法,实现了在同车道行车中,前后车安全车距地自动保持和自动刹车的功能。实际应用中,可实时预防追尾事故的发生,提高车辆行驶的安全性,减轻驾驶员的心理负担;同时该项目成果还可应用于汽车无人驾驶中,为汽车的自动无人驾驶提供了思路和技术支持,并且该系统还可改进为自动跟车系统,解决人手动操作时的延时,从而实现汽车操控的实时性、灵敏性,提高交通通畅。









评论