基于ARM的全数字双闭环无刷直流电动机控制系统设计

传统的直流电机具有运行效率高、调速性能好等诸多优点因而在工业传动中占据着重要的地位,但其本身固有的机械换相器和电刷导致了电机容量有限、噪音大、容易产生火花和可靠性差等缺点。随着计算机技术和微电子技术的发展,无刷直流电动机用位置传感器和电子换相器取代了有刷直流电动机的电刷和机械换向器,同时很好的保持了传统直流电机的优点且具有比有刷直流电机更高的运行效率。因此直流无刷电机一经产生就在工业生产中取得了广泛的应用,尤其在节能减排已成为时代主题的今天,无刷直流电机高效率的特点更显示了其巨大的应用价值。
本文引用地址:https://www.eepw.com.cn/article/201610/306664.htm1 全数字双闭环直流调速系统简介
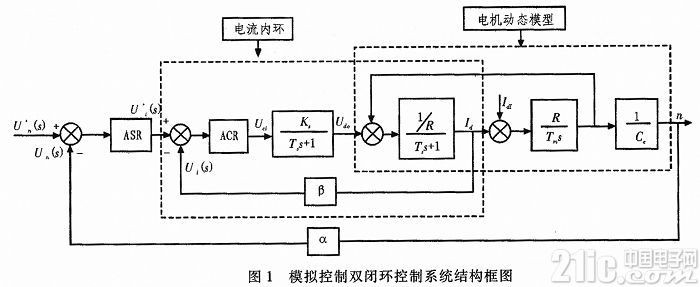
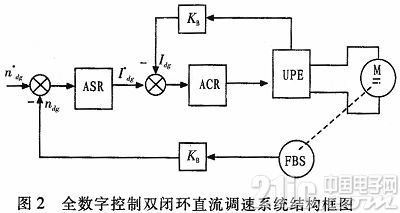
在稳态的情况下,直流电动机仅仅采用单闭环转速PI调节就可以在保证直流调速非常系统稳定的前提下实现转速没有静差,即输出完全跟随输入。但在快速起制动、抗干扰能力强等控制系统对动态性能要求较高时,因电动机在单闭环系统中电流和转矩的动态过程不能得到及时有效的控制,因而需在控制系统中设置一个电流调节环用于调节电流。所以控制系统中有转速调节环、电流调节环两个调节环,且这两个调节环之间实行嵌套连接。图1及图2分别为模拟控制与全数字控制下双闭环控制系统的结构框图和双闭环直流调速系统结构框图。
2 控制系统整体构成
全数字双闭环无刷直流电动机控制系统主要由ARM嵌入式处理器、LCD触摸屏、光电耦合电路、驱动电路、逆变电路、电流检测电路、直流无刷电机位置信号检测环节以及控制电路组成。
本设计中的ARM处理器为其内核为Atmel公司的ARM9系列32位CPU AT91SAM9261S,它采用5级整数流水线,主频最高可达300MIPS,支持Windows CE、Linux、Palm OS等多种主流嵌入式操作系统,在工业控制、检测设备和仪器仪表等需要高速数字信号处理的场合运用非常广泛。
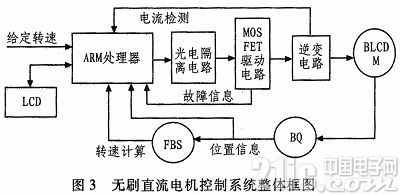
无刷直流电机控制系统整体框图如图3所示。当系统处在运行状态时,通过电阻给定转速信号,并经触摸屏实时显示及P、I参数设定,发出运行指令(如起动、正转、制动)。根据霍尔传感器检测到的电机位置信号控制换相,并计算电动机的转速来改变控制器的输出信号,从而调整电机的运行状态。电流检测环节主要是实现转速、电流双闭环控制和过流保护,从外部检测到的电流信号经过采样后,经放大、滤波送到A/D转换器进行模数转换,控制单元根据检测到的电流大小来调整电流调节器的输出。当出现过流故障时,电流检测电路会发出故障指示信号,送入ARM处理器进行处理。
3 硬件各模块设计
3.1 光耦隔离电路
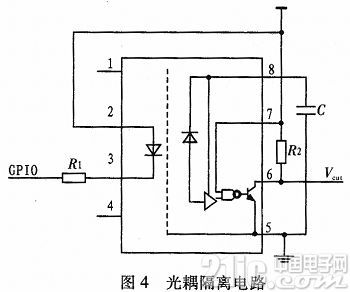
控制信号一般为10~20 kHz左右的PWM波,为了减少电磁干扰对ARM处理器的影响,需采用高速光耦进行隔离、整形和电平转换。本设计采用6N137光耦,开关时间最大75 ns,光耦隔离电路如图4所示。
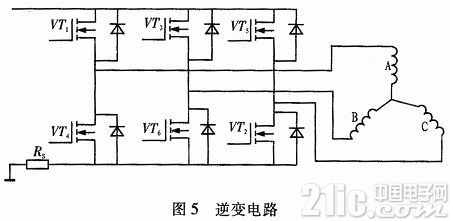
3.2 逆变电路
功率逆变电路采用三相星形全桥逆变电路,如图5所示。由6只IRF530N MOOSFET构成三相逆变桥,其中每只MOSFET功率管两端反并联一只二极管,用于续流和缓冲。低侧三只MOSFET管并联后串接一个小电阻Rs用作电流采样。
3.3 位置及速度检测
本设计中直流无刷电机位置信号的检测采用霍尔位置传感器,即无刷直流电动机自带的位置传感器,其输出侧通常采用漏极开路,所以必须在它的输出上接上相应的上拉电阻。
根据式1计算出两次换相间隔期间的平均角速度,然后在软件程序中换算成r/min,或直接根据△t计算出多少r/min。
△t一般较小,可以通过采样对PWM波计数的方式来确定△t。
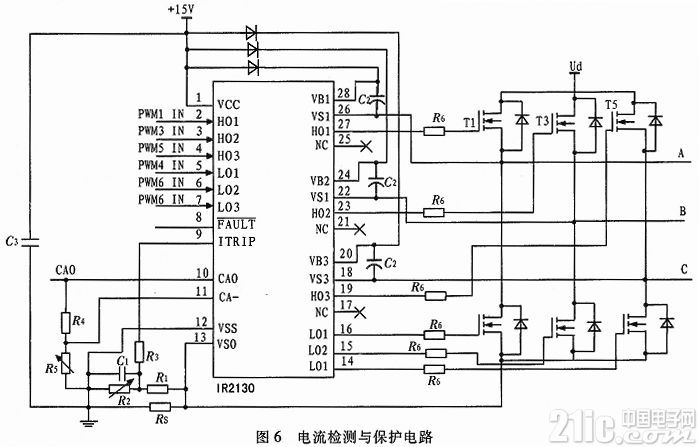
3.4 电流检测与保护电路
电流检测与保护电路如图6所示。IR2130带有电流电流放大器和过流输入保护环节,可以对电流采集信号进行放大。当过电流发生时,送到过电流检测引脚的电压高于0.5 V,此时R2130内部的过电流比较器迅速翻转,逻辑故障处理单元输出低电平,六路输入信号被锁存,![]() 管脚输出故障指示,故障时输出为低电平,六路输出驱动信号全为低电平,功率管进入全关断状态,使器件得到保护。欠压保护的工作过程与过流保护的工作过程类似。
管脚输出故障指示,故障时输出为低电平,六路输出驱动信号全为低电平,功率管进入全关断状态,使器件得到保护。欠压保护的工作过程与过流保护的工作过程类似。
4 控制系统软件设计
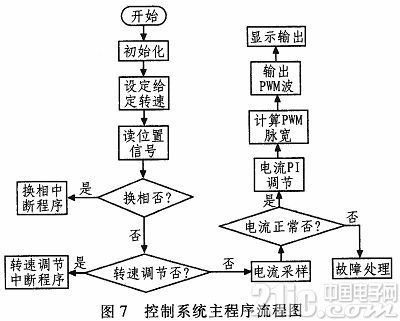
电机换相控制程序砑有2种设计方法,电机转速不高和电机转速较高。当电机转速不高时,换相周期较长,PWM周期远高于电机换相周期,这样可在每一个PWM周期对霍尔信号输入进行查询,判断是否需要换相,并设定一个计数器记录两次换相期间的PWM周期数用于计算转速。当电机转速较高时,两次换相期间相隔PWM周期数不多,查询换相的方法会导致换相不及时且影响转速计算精度,需通过中断的方法进行换相,在需要速度调节时直接通过中断接口函数读取速度值。在应用程序中加入中断响应事件消息响应函数,若中断发生,则进入中断子程序并设置相应故障参数。控制系统主程序流程图如图7所示。
5 结束语
无刷直流电动机用位置传感器和电子换相器取代了电刷和机械换向器,有效降低了噪音,避免了火花的产生,提高了控制系统可靠性。本设计对全数字双闭环无刷直流电动机的控制系统的软、硬件都做了详细介绍,以ARM为主处理器使得整个系统的运行效率更高、性能更稳定。实验室模拟结果表明,该系统具有较好的控制可靠性、良好的动态性能及系统稳定性。









评论