RTX和TM4C微控制器的扭矩加载控制器设计

摘要:针对电涡流测功机的扭矩加载实验问题,开发了一种基于ARM的嵌入式控制器。选取TM4C微控制器为CPU,以功率 MOSFET为功率驱动器件,利用PI算法,采用RTX实时操作系统实现了对电涡流测功机扭矩加载的闭环控制,并结合电涡流测功机进行了扭矩加载实验。实验结果表明:该控制器具有加载性能好、结构简单及可靠性高等优点,具有较高的工程应用价值。
本文引用地址:https://www.eepw.com.cn/article/201610/306582.htm引言
电涡流测功机主要用于测试发动机的功率,也可作为齿轮箱、减速机、变速箱的加载设备,用于测试它们的传递功率。扭矩加载控制器的稳定性及测量的准确性将直接影响工程人员对结果的分析判断。研制出控制品质优良的扭矩加载控制器,将提升国产测功机的技术水平,并促进发动机及其测控行业的发展。
近年来,ARM内核微控制器发展迅速,其性能高、耗电少、成本低,具备16/32位双指令集。本文选择TI公司的TM4C系列芯片,其拥有Cortex—M4内核,具备多个高精度定时器,可以输出多路互补且带有死区时间控制的PWM波形,满足电涡流测功机的控制需求。
对于扭矩加载系统来说,除了要求有强大的通用功能外,还需要其具有良好的实时性能,以满足控制系统实时采样和实时通信的要求。在众多实时软件中,Windows实时扩展平台RTX是其中较为突出的一种。RTX修改并扩展了Windows系统的硬件抽象层(HAL),形成与Windows操作系统并列的实时子系统,将原有系统的线程间切换时间消耗缩短到几μs。考虑到扭矩加载系统任务的复杂性,传统的单任务循环式的程序控制模式难以满足需求,本文采用嵌入式操作系统RTX实现扭矩加载控制,简化了系统设计。
1 系统总体方案设计
本系统采用的是兰菱机电(海安)有限公司的DW16型电涡流测功机,其具有结构简单、转动惯量小、制动力矩大、运行速度高、稳定性好、动态响应快等优点。 DW系列盘式电涡流测功机,主要用来测量动力机械的特性,尤其是中小功率和微小功率的动力加载测试,同时其也可作为其他动力设备的吸功装置。
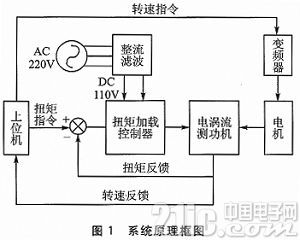
扭矩加载控制器系统原理框图如图1所示。扭矩加载控制器根据上位机给定的扭矩指令,与实时采集的扭矩传感器信号作对比,通过PI控制产生相应的PWM信号,输入到电流驱动模块,从而实现对电涡流测功机的输出扭矩的闭环控制。变频器通过接收上位机给定的转速指令,控制伺服电机的旋转,从而控制电涡流测功机的转速。除此之外,扭矩加载控制器还具备转速检测与电流检测模块,保证了系统运行的稳定性。
2 系统硬件设计
2.1 控制器硬件总体结构
现有的加载系统使用PLC与上位机进行通信,这是一个间接的通信过程,必须通过OPC服务器进行中转,使得系统通信延迟高达140 ms。其在实时性、可扩展性和智能化等方面存在局限性,难以保证系统的可靠运行,不能满足工业自动化控制不断发展的要求。
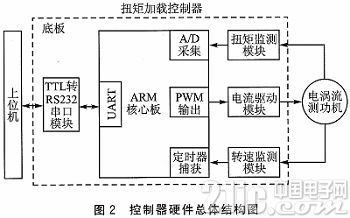
控制器硬件总体结构图如图2所示。为了提高系统的开放性,扭矩加载控制器硬件电路采用核心板加底板架构。由于扭矩加载系统的实时性要求较高,因此必须选择运算速度快且可靠性高的处理器。TM4C具备强大的数据处理能力和高运行速度,满足定时和通信要求,因此几乎承担了整个控制器全部的逻辑控制。控制器的 ARM核心板即为TM4C的最小系统,其外设都以插座的形式预留给底板。底板电路由扭矩监测模块、电流驱动模块、转速监测模块及TTL转RS232串口模块等部分组成。
2.2 电流驱动模块设计
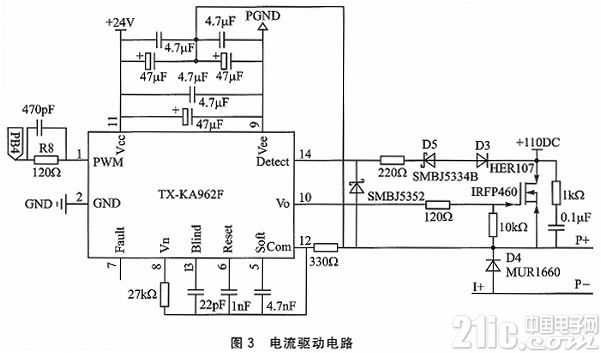
电流驱动电路如图3所示。考虑到系统的高频率及大电流的工作要求,扭矩加载控制器采用IR公司的IRFP460功率MOSFET芯片作为直流斩波器件,以TX—KA962F驱动器为核心,设计了驱动保护电路的方案。相比于传统的大功率IGBT驱动芯片,TX—KA962F驱动器可由24 V单一电源供电,最高开关频率可达60 KHz,也可根据需要调节盲区时间、软关断的速度、故障后再次启动的时间。一旦出现短路信号,驱动器将软关断IGBT,封锁输入信号,提高了整个系统的稳定性与安全性。
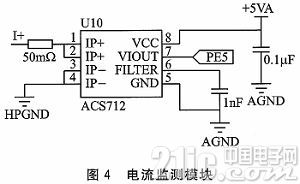
虽然一定的PWM信号占空比对应一定的测功机负载,但由于PWM控制信号的占空比与测功机负载并不成比例,因此对驱动电流大小进行监测是很有必要的。电流监测模块如图4所示,采用霍尔电流传感器ACS712,实现了对驱动电流的高精度采集。
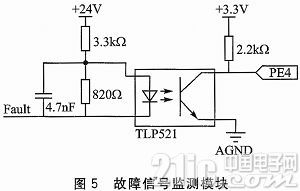
本系统采用的DW16型电涡流测功机,其额定电流为5 A。为保证系统的安全性与稳定性,需针对电路进行过流保护。当TX—KA962F驱动芯片14脚对12脚端的电压大于所设定的保护阈值电压时(即驱动电流大于测功机额定电流时),芯片内部将进行软关断,7脚输出低电平报警信号,通过光耦将调理后的信号传送给控制电路。故障信号监测模块如图5所示。
2.3 转速监测模块设计
在扭矩加载试验系统中,转速和扭矩是最关键的两个参数,其测量精度极大地影响着最终的控制效果。转速测量采用欧姆龙公司的EE—SX672型传感器,接收的脉冲信号频率在数值上与原动机的转速相同。转速监测电路利用高速光耦TLP521实现信号的调理功能。
2.4 扭矩监测模块设计
电涡流测功机摆动部分通过测力臂架把偏转力作用在TJL-1S型拉力传感器上,由它转换成与扭矩大小成正比的电压信号,经过AD623电压信号进行放大,传送给TM4C的A/D输入通道进行采集与处理。
3 系统软件设计
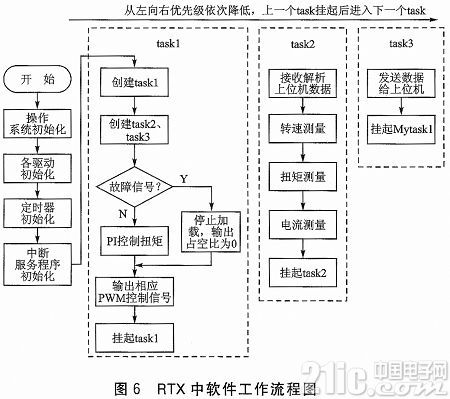
软件开发采用Keil软件的集成开发环境。基于RTX的程序设计是将一个大的应用程序分成多个相对独立的任务来完成。定义好每个任务的优先级后,RTX对这些任务进行调度和管理。本程序设置系统时钟节拍为50 Hz,共分为3个任务(task1、task2、task3),优先级分别为127、120、110,通过使用函数os_sys_init()、os_tsk_pass()、os_dly_wait()来实现各个任务之间的切换。
task1为扭矩控制任务,主要负责PI控制及检测故障信号,一旦检测到低电平故障信号,则输出占空比为0的PWM控制信号,其延时1个节拍进入就绪态,即20 ms执行一次;task2负责串口接收并解析上位机数据,并对转速、扭矩和电流信号进行测量,其延时2个节拍进入就绪态,即相当于40 ms执行一次;task3为串口发送任务,其延时3个节拍进入就绪态,即相当于60 ms执行一次。具体工作流程如图6所示。
控制算法是控制系统的核心,直接决定了控制系统的控制精度与性能。考虑到扭矩轴旋转时存在不可消除的振动,经测试发现只需采用比例和积分控制就可以达到较好的效果,因此最终采用了增量式PI控制算法。同时,为了避免扭矩测量噪声的影响,软件中对反馈信号加了惯性滤波。
扭矩加载控制器在接收上位机发送的数据时需要对数据进行验证,具体接收通信协议如下所示:

由于控制参数往往需要根据经验反复整定,而且起初并不能确定其量级大小,为了快速方便地进行控制参数整定,此处串口数据采取浮点数格式传输,相对于用整型数传输没有精度损失。
4 实验结果和分析
一般的反馈控制都存在稳态抗扰动能力与动态响应速度之间的矛盾,为了提高系统的调节速度,同时保证系统的超调、静态调节精度与抗扰动都在允许的范围内,需通过大量实验进行PI参数整定。
实验采用的电涡流传感器功率为16 kW,最大转速为13 000 r/min,额定电流为0~5 A。原扭矩加载系统的闭环响应曲线如图7所示。由图可知,原系统存在的通信延迟和控制参数选择不恰当等原因,导致其控制精度较低,不符合工程应用的要求。
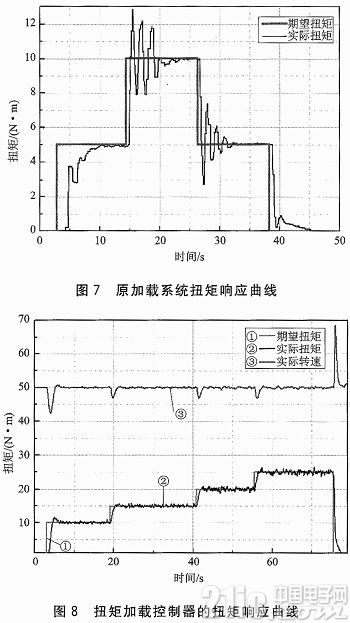
在本控制器作用下,实验结果曲线如图8所示。对数据段中所存的数据进行统计,可以得出如下的性能指标:系统扭矩闭环控制精度优于2%,阶跃响应稳定时间小于2 s,过渡比较平稳,到稳态时超调量较小。响应曲线存在波动是因为电机旋转使得设备台面不可避免地有振动,影响了传感器的精度。由实验结果的分析可知,该扭矩加载控制器具有良好的动态性能和控制精度,符合系统设计的要求。
结语
综合考虑系统所需实现的功能、硬件的工作环境的基础上,完成了基于RTX实时操作系统和基于ARM的以TX—KA962F驱动器为核心的扭矩加载控制器。设计中充分考虑系统的实时性问题、电磁兼容问题,提高了系统的可靠性。实验表明,该扭矩加载控制器能较好地解决现有系统中存在的通信延迟问题,且具备很好的动、静态性能。









评论