基于改进神经网络的非线性系统观测器设计

近年来,鉴于神经网络的特性和发展潜力,神经网络成为研究的热点之一。伴随着控制对象复杂性的提高,系统存在的不确定因素和难以确切描述的非线性特性也随之增多,神经网络的研究和发展显得尤为重要。与传统控制系统状态观测器相比,神经网络状态观测器具有更强的逼近非线性函数的能力和容错性,尤其适用于多输入多输出系统。
与线性定常系统中的设计[2]相比,本文是在非线性系统中利用前馈神经网络的函数逼近能力,设计出了一种神经网络观测器,并对观测器的稳定性进行了分析。本文采用了LM优化算法来改进BP网络,由于其算法可以比标准梯度下降法网络训练速度提高几十甚至上百倍[3],从而大大提高了工作效率。仿真结果说明了设计的合理性和有效性。
1 观测器设计原理
神经网络观测器的原理与传统状态观测器相似,都是利用重构的思想。神经网络的主要作用是来逼近系统中的非线性函数。首先将输入量u、状态变量x作为BP神经网络的输入,对神经网络进行训练,使其逼近非线性函数h(x,u);然后将训练好的网络用于构成观测器,并通过神经网络观测器的输出y与原来系统的输出y的差值来确定调整BP网络的权值,使其获得想要的状态估计变量x。系统只有y可以直接测量。
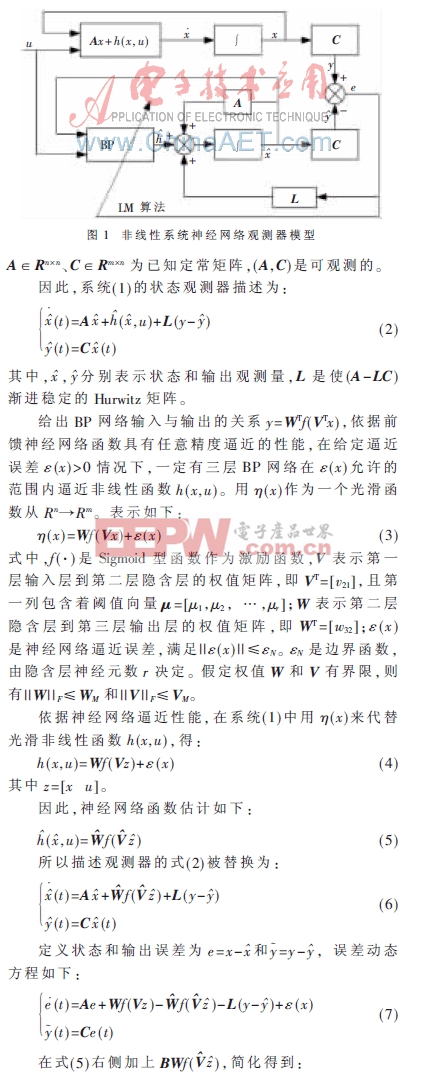
设计一个神经网络观测器关键是找一个神经网络去识别非线性,并且利用传统的观测器思想去重构状态。因此,神经网络观测器模型如图1所示。
2 神经网络非线性系统观测器的建立
给定如下的非线性系统:






评论